10 汽車用其他圓柱形滾子軸承 /N出口商品檢驗84825000
在球面上,最短線是大圓的弧,所以平面幾何中的線在球面幾何中被大圓所取代
利用unity自帶的light probe 工具,我們可以愉快地在遊戲場景中烘培當前位置的cubemap環境貼圖:這樣就完事具備,玻璃渲染的過程類似使用球面貼圖渲染反光,玻璃材質上的畫素根據對應的光路烘培貼圖找到視線在球面貼圖上對應的落點,

要模仿一個作品,首先先找到這個案例的核心,它的核心是填充的運用和球面化效果,那麼我們只要能處理好球面化效果,其它細節都是一個走量的工程
無論是膠捲還是CMOS/CCD,獲得一個平面要比球面容易得多得多,鏡頭在設計時就往聚焦在一個平面上設計了,不然怎麼調焦都沒辦法得到視場裡處處清晰的照片,那玩意兒還能賣得掉嗎
平凹球面透鏡用於擴充套件光或增加光學系統中的焦距,或平衡系統內其他鏡頭的像差
三維旋轉的表達MP67:典型群(1):拓撲性質 中提到微分同胚(diffeomorphic)於三維實射影空間
“全方位均勻外凸”刻畫的是 球面,不是 球體空間中各點等曲率的二維平面有三種零曲率:平面,對應 歐幾里得 幾何正曲率:球面,對應 黎曼 幾何負曲率:hyperbolic surface(不知道中文了
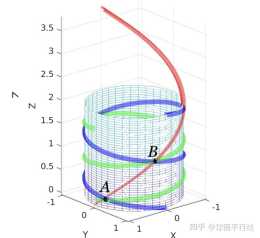
圖三以豎直方向為母線,將圖三的平面一層層的捲成一個圓柱面,並最終保證A點重合,B點也重合,這時無論是紅線還是藍線都是圓柱面上的螺線或測地線,如圖四所示
我的觀點是:球面上的任何的圓(不僅僅是大圓)都是球面直線,因為它們的曲率皆等於零
這說明在球面上緯度圓並未發生彎曲

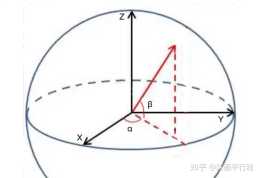
而從圖中幾何關係可以看出兩點的三維座標是呈比例的(注意這裡討論的只是在x,y,z正半軸,對於負半軸同理,不過要加上相應負號):而由於點在八面體上,因此滿足方程,代入就能得到點座標對於下半球空間就還需要多算一步(注意這種變化只是想把整個球面投
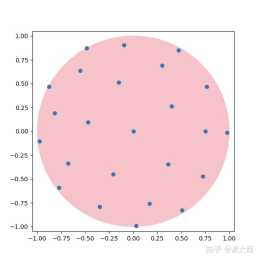
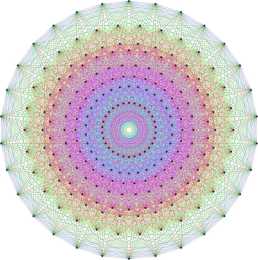
如何選取到最小值就是典型的流形上的光滑最佳化問題,需要透過最佳化數值求解,參考彙總的結果對於49個點,其中一個近似解如下(北極方向的正交投影):再多一些點也有近似解,比如2500個點,北極的正交投影就是:斐波那契格點構造法另一種比較“美觀”
人們所以執著的認為兩點決定一個大圓,這是因為人們只看到了球面上的兩個點,而忘記了球心的這一個點

GeoSQT本質上屬於全球離散格網(DiscreteGlobalGrid,DGG)的一種,全球離散格網是基於球面 (橢球面)的一種可以無限細分、但又不改變其形狀的地球體擬合格網,當細分到一定程度時,可以達到模擬地球表面的目的,目前空間剖分的

而是以螺旋形軌道前進的,因此光的波場可能並非是完美的球體而是更像是海螺一樣一層又一層以螺旋球面結構累加在一起,我還在日光燈的電波觀測到這樣的現象電波好像是按照一條線不斷的往前破,因此推斷光波不是球面結構的,而是螺旋球面結構
——————————A題,和往年一樣,專業性比較強(熟悉我的人應該知道,我向來不做某個方面專業性特別強題目,相反,我每次選擇開放性最強的題目)簡要分析一下,這次以FAST為背景,射電望遠鏡反射面調節問題,需要光學、拋物線以及諸如訊號接收比這
補充:這組題考查解釋能力,即要明白為什麼這個結論是對的,比如3涉及緊Kahler流形上的上同調限制

所以第一項為:第二項可以直接利用抽象指標表達式和具體指標表達式的對應關係(參照我之前的筆記)之直接寫出來為:將兩項合起來得到測地線方程:對於球面,由於克氏符只有三個分量不為零,可以得到,測地線的引數方程滿足:代入前面求到的分量結果得到球面測
在正面撞擊發生時,座艙在瞬間會隨著底盤向前方執行,由於與底盤接觸是球面結構,座艙隨即會呈弧線向前上方運動,會卸掉一部分衝擊力,加上座艙艙體選用的是更耐衝擊的材料,更加能夠保證駕車者的安全