
8cm 1966年《三合一》 厄格羅 91

,r^{p-1}的線性無關性即可得)則以它們為基,可以構建一個Q上的向量空間,我們記作V_f,其維度為e,也就是一般有V_f的維度為(p-1)/f五之後,我們研究了\phi(H)和Fix(\phi(H)),它的含義是Q(r)中所有在\phi
02427wb如果你提供的是有效值,那麼PHI=0

g, features, labels, num_classes, train_idx, val_idx, test_idx, train_mask, \val_mask, test_mask = load_data(args[‘datas
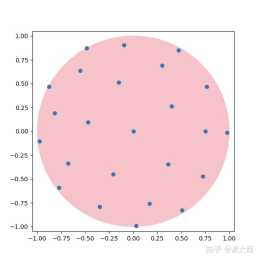
如何選取到最小值就是典型的流形上的光滑最佳化問題,需要透過最佳化數值求解,參考彙總的結果對於49個點,其中一個近似解如下(北極方向的正交投影):再多一些點也有近似解,比如2500個點,北極的正交投影就是:斐波那契格點構造法另一種比較“美觀”

[Xt,Yt,E_xyt]=E_r_to_xy(E_r_t,R)
有了這兩個函式之後,就可以用兩個隨即變數構造一個符合pdf分佈的方向拉~根據球面角的轉換公式,可以輕鬆寫出隨即方向程式碼float3random_direction(e0,e1){floatcos_theta_sqr=1-e0
下面的連結給出了四種φ的用法:Petzold Book Blog其中說到了unicode的定義:Latin small letter phi as part of the International Phonetic Alphabet (I
Dominic Gutierrez, Thomas Dominic Gutierrez, Tom Dominic Gutierrez, Thomas Gutierrez還有人將它打出來了:Woosh:標準模型的拉格朗日量(附LaTeX公式)

integrateimportsimpsdefgain_average(theta_rad_list,phi_rad_list,pattern_matrix_linear):“”“to calculate the average gain

t2=z2+phi(x1,x2)

Public key: a=101, N=8633Private key: b=7277Enter a number: 8634c=1, m=1RSA演算法的安全性與素因子分解我們可以發現在上述演算法求解金鑰時用到了,而實際上公鑰裡儲存了N

//看車輛運動學模型——腳踏車模型constdoublenext_phi=common::math::NormalizeAngle(last_phi+traveled_distance/vehicle_param_

//此時的result只有路徑靜態資訊,x,y,phi//將Hybrid A*計算的軌跡結果,按照行駛的正反方向切換,分割為數段for(size_ti=0
inter_channels,-1)pairwise_weight=pairwise_func(theta_x,phi_x)#y: [N, HxW, C]y=torch

2)/2) / sqrt((ln 1
瀉藥,協處理器也有很多型別,我這裡只拿inter的Phi作為例子,其他的協處理器我沒用過,所以不加評論協處理器其實就是透過擴充套件指令集或提供配置暫存器來擴充套件核心處理功能,如果當前cpu核心將要執行的指令是協處理器指令,那麼協處理器會接

Krahang,來源:TwitterKrahang每年在泰國都會有數量很龐大的目擊事件,不過基本上很難找到影像記錄,多是文字記載,比如今天某某村村民發現天上有一個Krahang,或是某某路人抬頭髮現Krahang正要攻擊自己這種,仔細想一想

結果Cb2n:真實姿態陣):Cb2np:計算導航系姿態陣(有誤差的)):失準角反對稱陣為:phi_skew=0
參見牛人寫的:支援向量機通俗導論(理解SVM的三層境界) - 結構之法 演算法之道 - CSDN部落格如果是訓練階段, 應該是對任意兩個訓練樣本進行核運算,n個樣本點的話,會有n*n次代入核函式的運算