
Holmes, “Stationary frame current regulation of PWM inverters with zero steady state error,” 30th Annual IEEE Power Elec

就是我們的基向量在Jennifer座標系下的座標,即我們的單詞在她那啥意思
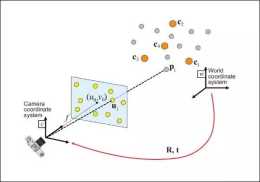
1.1 眼在手外涉及到四個座標系:{B}:機器人基座標系【固定不變】{E}:機器人末端連桿(與標定板固連的連桿)座標系{K}:標定板座標系,(字母 B 和 C 都被佔用了,所以隨便選個 K){C}:相機座標系【固定不變】主要就是求解D它們之

P Q R是飛機的翻滾角速度、俯仰角速度和偏航角速度,φ θ ψ是飛機的翻滾角,俯仰角和偏航角接下來我們插入一些控制論的內容,對於一個狀態函式,它的基本表達為x和u是狀態方程和控制方程的變數,A和B是狀態方程和控制方程的係數,當飛機進行主動
這樣,將公式(1)具體標籤化如下:// P`大地 = P大地 * M 物體 to 大地 ---公式(2)這樣,將物體座標系,慣性座標系和世界座標系串聯起來就得到引用1
目標不等式成立

所以人們試圖在找尋同頻的人,有沒有一種可能,在生命軸孤獨的流動中,找到一個和自己恰好共享“Right Now”的人,每當你我的“Right Now”重合,人們會給這種奇異的感覺定義一個名字,叫“愛”,但我們一直在時間線上流動,巧遇後可能也會
極化對稱堆疊條形圖另外,相較於柱狀圖,在視覺化相同的資料情況中,玉玦圖因為其圓形結構,在圖表大小上更節約空間,各分類資料的數值差異也會更加明顯
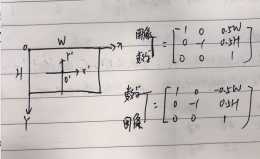
影象座標系轉化為數學座標,經過旋轉之後,數學座標系轉化為影象座標系
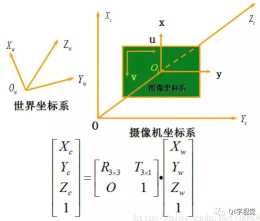
3、張正友標定介紹(張正友標定只考慮了徑向畸變,沒有考慮切向畸變)由上面的座標轉換可得:我們把世界座標系放置在標定板平面上,令Z=0,這時有:H為3X3矩陣,並且有一個元素作為齊次座標,則有8個未知元素,一組座標對應兩個方程,則至少需要四組

文章看不懂沒事,看圖,先有個大概的感覺,所謂的“變換”,無非就是看待事物的角度不一樣,不一樣的角度,解決這個問題的難度天差地別

機床參考點:數控裝置上電時並不知道機床零點,為了正確地在機床工作時建立機床座標系,通常在每個座標軸的移動範圍內設定一個機床參考點(測量起點),機床起動時,通常要進行自動或手動回參考點,以建立機床座標系和啟用引數
確定質點位置所需三個獨立值分別為位矢的表示:若在二維空間,則捨棄,成為極座標系球座標系選取的三個獨立的基底為:(定義它們的方向分別指向對應座標增加的方向)位矢在平面上的分量記為,與軸的夾角記為位矢的表示:引入時間後,有速度和加速度的概念某種
笛卡爾座標系(直角座標系)若干年前的歐洲,有一個名為笛卡爾的數學家臥病在床,除了盯著牆角看啥也幹不了,在經歷了長久盯牆角折磨後,終於他悟了,發明了大明頂頂的笛卡爾座標系,也就是我們從小學就開始學的直角座標系(包括平面和空間)
)這種轉換其實涉及到一個重投影的問題,跟大家說一個超級方便的方法,使用Warp函式進行重投影操作(可以針對不同的空間參考之間進行轉換),話不多說直接上程式碼(我們使用的是做過座標系轉換的資料,如果大家的座標系不統一,可以參照上邊的程式碼來使
謝絕轉載重特大安全生產事故是“小機率事件”,某地為防止和杜絕這種“小機率事件”,採取了一系列“大機率思維”下的應對方法,包括要求轄區政府和企事業單位全員、全城、全程排查消除隱患,分類制定《安全生產事故應急預案》
題目描述裡整一個豎著的圖片給人看很方便是吧橢圓方程為先做第三問再做第二問
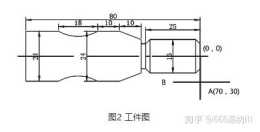
因此,刀具的目的是將刀具的切削點保持在程式設計座標系中刀具的起始點,這有助於透過數控系統對工件進行後續控制,使被車削的零件與固定點具有精確的尺寸關係,並確保加工零件所需的精度

其實,尤拉角有基於外部座標系(世界座標系)來旋轉的,只是用得相對少一些而已
首先先給出怎麼帶,再給出為什麼這麼帶:怎麼帶閔氏時空慣性系線元為你給的圖中的座標變換,先令,再兩邊求微分,可得代入慣性系線元,得化簡得再把代入該式,化簡即為你圖中的式子為什麼這麼帶首先要知道,你圖中的式線元所在座標系對應的是勻速轉動觀者這個