
從漢語的角度來講,座標的“坐”,在這裡最恰當的意思,應該是“建築物的位置或背對著某一方向”

作用在它上面的力是:重力離心力來自壓力梯度的力因為質量在旋轉座標系S中是靜止的,所以在S中這些力的總和必須為零:式9:非慣性參照系中水單元的平衡方程

介質在t<0時溫度為構造無量綱量,導熱微分方程的無量綱形式為因為時無量綱量,所以它應該是組成的無量綱量的函式,這時候構造,(這個構造相當的巧妙,後面化簡方程的時候就可以知道了),透過構造無量綱變數在化簡方程的時候消掉了的時間t,我感覺
ROS最常用的座標系為map、odom、base_link、base_footprint、base_laser座標系
先分析d軸起始位置與a軸重合的情況:基於cos的park變換座標系如下:透過座標分解可得:將clarke變換的公式代入上式就可以得到abc到dq0的座標變換矩陣,以等幅值為例,如下:如果d軸起始位置滯後於a軸90度:基於sin的park變換
在涉及到不同座標系轉化的時候,通常是把北京54座標系、西安80座標系、2000國家大地座標系轉為通用的WGS84座標系
在座標系XOY中,設橢圓方程為x^2/a^2+y^2/b^2=1,考慮座標變換X‘O’Y‘:x=ax’,y=by‘,則橢圓在X’O‘Y’中變為圓,下面簡述證明思路:1

com/2-0-first-steps/認識 3D 世界三要素:場景、攝像機、渲染引擎Scene(場景):用於 babylon 的視覺展示,相當於 canvas2d 的 Context,可以往其中新增3d物體Camera(攝像機):負責對場

將分別分解到α軸和β軸,並且引入等幅值變換系數3/2,得到三相靜止座標系到兩相靜止座標系的變換:寫成矩陣的形式:其中,為了方便地實現逆變換,引入一個不平衡量,從而將變換矩陣修改為可逆矩陣——當三相電壓存在不平衡分量時滿足:所以修正後的變換為
在歐式變換中,除了旋轉還有平移:於是我們用一個旋轉矩陣和一個平移向量就能描述空間中的座標變換關係
雖然世事變遷,焦距會越來越大,但座標系是永遠不變的,正如一次函式不忘初心,專一的拼命努力,雖然不夠優秀,但最起碼努力過,才能在座標系上無愧於自己也是函式這一事實,才能和其他函式一起構成幾何座標 ,在數學王國裡盡情歡笑

座標變換假設三維空間中有一個向量,該向量在A、B兩個空間直角座標系下的座標分別為和,根據座標的定義可得將上式寫成矩陣乘法的形式為因為基底向量之間是線性無關的,所以上式可以化簡為或者稱為某向量在A座標系/A基底下的座標變換到B座標系/B基底下
座標系統FANUC發那科法蘭克數控車床程式原點在程式開發開始之前必須決定座標系和程式的原點
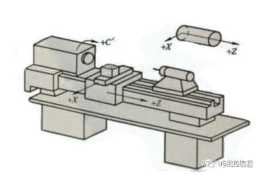
數控裝置通電時並不知道機床原點,為了在機床工作時正確建立機床座標系,通常在每個座標軸承的移動範圍內設定一個機床參考點(測量起點),想學數控程式設計加QQ群192963572免費領取學習資料和課程,,機床啟動時,首先要進行機動或手動的回參考點
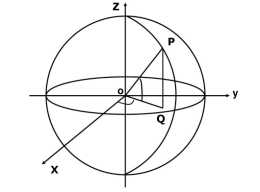
(三)對映:從座標系到座標系的變換1、關於平移座標系的對映(1)當{A}與{B}姿態相同時,可用矢量表示{B}的原點相對於{A}的位置,如圖2-4(2)因為姿態相同,所以用向量相加的方法求點P相對{A}的表示:(3)對映,即描述一個座標系到
當簡化為引數方程後,一個t你發現,t每改變一點,你又可以在座標系裡面只點一個點,然後就畫出了圓
求導:第一項表示在旋轉座標系中觀察的速度在固定座標系下的表示(表示在旋轉座標系下的速度,乘以就轉換到了固定座標系下)記作:第二項就是上面提到的向量繞軸旋轉:得到結果:將標量移到座標系裡面去:Introduction to Dynamics例

正運動學方程是各個關節變數的函式,描述了工具座標系相對於基座標系的位置和姿態逆運動學是指給定操作臂末端執行器的位置和姿態,計算所有可達給定位置和姿態的關節角,我們將這個過程稱為從笛卡爾空間到關節空間的對映

共同描述相機座標系和世界座標系下點座標的轉換關係
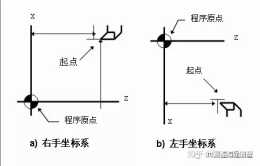
由於模型的絕對定向,要求變換前後兩座標系的軸系大致相同,而且地面測量座標是左手直角座標系,攝影測量座標系是右手座標系