1 從路徑到軌跡期望狀態生成器的目的是在符合動態約束條件(在角度,平移速度和加速度上進行限制)下計算和流化機器人狀態序列,對應隨後指定的路徑

本篇文章先系統介紹下SVO的原理,方便後面對程式碼的理解系統流程可以用下面這張圖概括其實這張圖少了系統中一個步驟,就是初始化,所以我們以列表形式列出系統流程如下:1. 初始化:得到相機初始位姿和特徵深度值沒太多可講,多數slam系統的初始化
1.1 眼在手外涉及到四個座標系:{B}:機器人基座標系【固定不變】{E}:機器人末端連桿(與標定板固連的連桿)座標系{K}:標定板座標系,(字母 B 和 C 都被佔用了,所以隨便選個 K){C}:相機座標系【固定不變】主要就是求解D它們之
Smoothness loss為了加強區域性平滑,我們引入了深度和光流的邊緣感知損失:Depth LossFlow Loss最佳化後的深度和位姿可用於合成光流,在線上自適應過程使用來監督FlowNet:Photometric Loss在之前
![[SLAM] a bite of SLAM](https://img.heatask.com/upload/thumbnail/c17uMy25EfC7mbyfyoA8+8vsH3ZR1TOgGjia87JhrQmZXjtI0GHve+ea0QKbPEYhyFvjV7zbkWGBXaNQzQZv1NMndQCc14Maa4q0F7JYrGpnY3sxc.jpeg)
在視覺前端中,主要的任務是完成對相機位姿的估計和建圖,這時得到的還是一個區域性最佳化的粗略結果,不可避免地包含噪聲和誤差,後續還需要通過後端最佳化,利用更多約束條件對其進行微調,以獲得精確的位姿和地圖

因此,現在利用詞袋模型我們將回環檢測大致分為了以下三個步驟:構建字典(所有單詞的集合)確定一幀中具有哪些單詞,用向量表示 (1表示具有該單詞,0表示沒有)比較兩幀描述向量的差異字典結構字典由單片語成,而單詞來自於描述子

上面約束函式的解釋(非凸集導致區域性極值):採用的是區域性最佳化演算法,因此依賴全域性plan提供的初始值,每個障礙物隻影響部分pose點:將有約束條件準換為無約束,避免拉格朗日方法(導致hessian矩陣的維度和求解問題的主變數一樣)Th

具體來說:很容易知道每個點採集的時間(自己計算或者鐳射雷達採集的時候該資訊是可儲存的),已經知道了上一幀最後一個點的採集時間t_k-1和當前幀最後一個點採集的時間是t_k,在這中間的當前幀的點採集的時間是t,令s=(t-t_k-1)/(t_
(如果沒有學習過機器人學的CVer們,應該是不會有這個問題的,只有我這種研究Robotics的人在步入CV大門的菜鳥才會懵圈)這個問題在我第一次入門CV時遇到的,要想捋清楚這個問題,我們還是要回到上面給出的座標變換的定義:這個式子是將動系中

不同於特徵點法的根據特徵點匹配關係來估計運動,直接法可以根據影象的灰度資訊,同時估計相機運動和點的投影,從而不用計算關鍵點和描述子,既可以節省計算時間又可以應用於特徵缺失的地方

其中processImu會透過estimator的preintegration_進行中值積分,計算出來一個第2幀和第3幀鐳射之間的相對位姿估計,然後processSecondScan會以preintegration_積分的結果為初值,以點雲

size())continue

在里程計模組,特徵點提取是用角點和blob mask,IMU用來預測相對位移用來定義特徵匹配的搜尋半徑,然後透過SAD進行匹配,用到預測座標系的距離進行加權,得到的特徵點透過RANSAC獲得內點,如果有IMU,那就1-RANSAC,如果沒有

假設儲存了這些元素之後,我們試想來了新的一幀之後,怎麼去重定位出當前幀的位姿,首先對新來的幀提取區域性特徵點和區域性描述子,然後根據區域性特徵計算出BOW向量,用當前幀BOW向量計算出與地圖中最接近的關鍵幀(visual place rec

幀圖匹配 基本和幀間匹配一樣,不過是把當前幀和區域性地圖匹配:最佳化先驗透過IMU實現, 將IMU測量的角速度定義為(後面兩項分別是靜態誤差和零白噪聲):在誤差矯正後透過四元數運動學公式可以獲得幀間的旋轉資料:基於關鍵幀的快速子圖構建並不是

4 外點剔除,動態目標濾除為了避免真實環境中的運動物體對掃描匹配精度的影響,執行以下動態目標濾除策略:在每次的位姿最佳化迭代中,重新尋找每個特徵點的最近鄰點,並將點線殘差和點面殘差加入到目標函式當中,首先執行少數幾次的迭代位姿最佳化
3 光束法平差類似ORB-SLAM最佳化方法,不過改進g2o庫使其適用於全景成像模型,給出重投影誤差函式式的解析導數形式,即誤差函式對於位姿即地圖點的雅可比矩陣
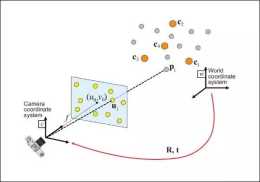
位姿估計(Pose Estimation):計算出物體在攝像機座標系下的位置和姿態,對於機器人而言,需要抓取東西,不僅要知道這是什麼,也需要知道它具體在哪裡

補充:基於特徵點方法的單目VO思路:從影象中提取稀疏特徵,使用描述子進行特徵點匹配,再進行初始化(根據對極約束估計相機的位姿,再根據三角化得到特徵點的深度(以初始化時的 t 為單位1,計算特徵點的深度)),然後可以轉化為PnP問題,透過構造

(2)關於邊緣化邊緣化在機率中的意義是條件機率,在SLAM的BA問題中是指利用H矩陣的稀疏性進行加速計算(解增量方程),是這樣的:根據H矩陣的稀疏性對H矩陣進行區域劃分,同時令由於我們的根本目標是求解增量方程,因此想讓H求逆更簡單,也就是想