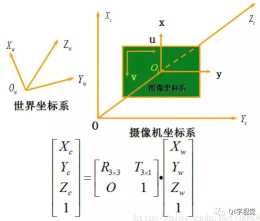
3、張正友標定介紹(張正友標定只考慮了徑向畸變,沒有考慮切向畸變)由上面的座標轉換可得:我們把世界座標系放置在標定板平面上,令Z=0,這時有:H為3X3矩陣,並且有一個元素作為齊次座標,則有8個未知元素,一組座標對應兩個方程,則至少需要四組
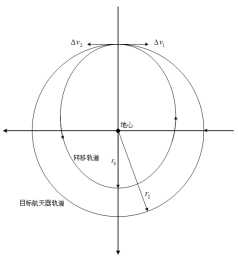
切向雙衝量機動軌跡如下:切向雙衝量機動(VVLH座標系)採用切向雙衝量機動進行位置保持點間的轉移,在轉移起點和轉移終點分別施加大小相等方向相反的切向衝量,轉移時間約為一個軌道週期

數學定義如下:其中為度規係數或拉梅係數,起模長歸一作用:線元向量的定義為:兩點間距離定義為:若座標系滿足正交歸一條件:則可進一步化簡為:以柱座標為例:有位置向量各座標偏導數有位矢可重新表示為線元向量有兩點間距離有2、正交曲線座標系中的速度與