設n為二維單位向量,下式給出圍繞穿過原點並垂直於n的反射軸來執行反射的矩陣:在三維中,為了使變換成線性,平面必須包含原點,執行反射的矩陣是物件只能“反射”一次,如果再次反射它,那麼物件將被翻轉回“右側朝外”,這與將物件從其初始位置旋轉是一樣

根據定義凸集經過保凸變換以後仍然是凸集,如凸集的交集仿射變換投影變換分式線性對映3
(2)又因為:所以正交矩陣的行列式必定是+1或-1

我們考慮變化後的基向量的位置,不難看出,要計算變化後的基向量的位置,只需要在數軸上做兩個基向量的投影,如下圖所示:我們假設向量是單位向量,則得到的變換矩陣(投影矩陣)為,則此時空間中任意向量經過投影變換的結果就是投影矩陣與這個向量相乘,和這
MIT Numerical Methods for PDE Lecture 2: Solution Error Analysis - YouTube這裡我們考慮泊松問題,假設有一個泊松方程:將其寫成矩陣的形式:然後再寫出泊松方程解析解與數值
則 由可交換的條件 (設原矩陣為A)AP=PA而PA 相對於將A的第一行都乘以 -1, AP相對於將A的第一列都乘以-1根據可交換的概念就可以得到結果,由二者相等的關係可得,A的第一行和第一列除了對角線元素外均為0

就是我們的基向量在Jennifer座標系下的座標,即我們的單詞在她那啥意思
對於表示式(2),我們給了向量組A另外一個名字,就叫矩陣A
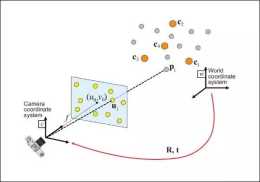
1.1 眼在手外涉及到四個座標系:{B}:機器人基座標系【固定不變】{E}:機器人末端連桿(與標定板固連的連桿)座標系{K}:標定板座標系,(字母 B 和 C 都被佔用了,所以隨便選個 K){C}:相機座標系【固定不變】主要就是求解D它們之

下面具體展示了不同晶系的剛度矩陣:01立方晶系——只有3個獨立矩陣元(C11,C12,C44)02六角晶系——有5個獨立矩陣元(C11,C12,C13,C33,C44)03三角晶系a) 32,3m,-32/m——有6個獨立矩陣元(C11,C

協方差(Cov):用於衡量資料兩個維度之間的關係(正相關還是負相關)
我就在想數學一定是可以解決問題的,那麼我現在所學的實對稱矩陣的合同,也是一定可以解決某些問題的,然後我就在知乎裡搜尋了一下這個問題,並且找到了我想要的答案,看完內容的我突然間發現像程式碼一樣生硬的線性代數竟然可以在我的腦海中活靈活現
三維旋轉的表達MP67:典型群(1):拓撲性質 中提到微分同胚(diffeomorphic)於三維實射影空間
以矩陣構成的空間為例它所包含的子空間有:的對稱矩陣、的對角矩陣、的上三角形或的下三角形矩陣

跟車或會車時,ADB的攝像頭會自動捕捉前方車輛的位置,控制系統計算分析後,會將相應位置的LED調暗或是讓其熄滅,避免強光晃到前方駕駛員產生眩目
可參考 斜對稱矩陣_百度百科偶數階反對稱行列式的計算,可參考 Pfaffian 值,Pfaffian 多項式,以下資料有詳解:[高代習題課拓展] 反對稱陣的Pfaffian行列式的組合定義及其應用——反對稱陣的Pfaffian - to
現在考慮另一個問題,對於n×n的矩陣,需要多少次操作
通常我們的計算方法和大家說的沒多少差別:A,一個是生成symbolic expression, 然後需要算的時候帶入角度和角速度計算,這個速度其實與怎麼生成表示式還有最後帶入計算表示式的方法有很大關係
目錄:概述影象基本變換仿射變換原理python實現一、概述影象的幾何變換主要包括:平移、縮放、旋轉、仿射、透視等等

寫點公式不要太方便,同樣的也可以用在機器學習的矩陣求導之中