百度一下繞三個軸旋轉的變換矩陣形式,太長我記不住,這三個矩陣依次作用到[x0, y0, z0]‘上,得到新的位置,那你把三個變換矩陣連乘,得到關於旋轉角的解析表示式

一個常見的LDA分類基本思想是假設各個類別的樣本資料符合高斯分佈,這樣利用LDA進行投影后,可以利用極大似然估計計算各個類別投影資料的均值和方差,進而得到該類別高斯分佈的機率密度函式
shape[0]然後接下里就出現degree矩陣了,在normalize方法裡def normalize(mx):“”“Row-normalize sparse matrix”“”rowsum = np

%讀取圖片(為256×256灰度)subplot(1,3,1)

如果wi,wj作為上下文,我們就希望下面這個機率公式越大越好,其中機率公式表示是條件機率的邏輯迴歸表示,其中u和v分別代表中心詞向量和上下文向量:那麼目標函式就是要最大化下面這個函式,其中w是文章T中的詞,c是中心詞w對應的所有上下文單詞:
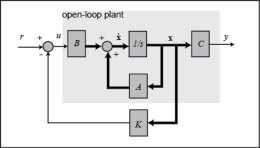
FSFB的缺陷在上述形式的FSFB中,改變引數可以提高系統的幅值使系統的輸出和系統參考值保持一致,然而引數會影響系統的穩態誤差,詳細推導如下:根據比例參考型的FSFB結構,系統的穩態誤差可以表示為如下所示 :(12)假設矩陣為零矩陣,根據傳

array([[0,2,5],[-2,0,-7],[-5,7,0]])))輸出:True19. 厄米特矩陣 - Hermitian matrix在方陣的前提下,矩陣 A 的共軛轉置矩陣恰好等於原矩陣 A,則稱之為厄米特矩陣
標籤:協方差 轉置 跡重要程度:基礎定義定義1:矩陣的跡一個矩陣的主對角線(從左上方至右下方)上各個元素的總和被稱為矩陣的跡,一般記作定義2:矩陣的轉置把矩陣的行換成同序數的列得到一個新矩陣,叫做矩陣的轉置,記作比如:的轉置為定義3:對

接下來幾期會繼續分享在時間序列課程裡其他的矩陣分解方法
奇怪的題目,實際上只要記住AA* = |A|I,其中I是對應階的單位陣,所以和伴隨矩陣相乘要麼得到單位陣的倍數,要麼是0矩陣,取決於A是否滿秩,A不滿秩的時候一定得到0矩陣,也就是乘積要麼秩為n,要麼秩為0

我們觀察到其實就是另一個矩陣,記作,所以不過,我們想要使用鏈式法則的過程來定義中間結果,所以我們可以看到如何在非標量導數中的應用

執 行 命 令 “ Computations=>Weighted Super Matrix=>Graphical”得到加權超矩陣如表6-2
一個m×n的齊次方程組的增廣矩陣的行階梯形最多有m個非零行,故最多有m<n個首變數,故必有自由變數,我們對自由變數任意賦值,均可得到齊次方程組的一個解

(原始稿寫在word裡的,貼上在知乎上時遇到各種不順,乾脆就直接貼圖啦~)參考資料:《視覺SLAM十四講 第二版》高翔(主要參考資料)《機器人學 第三版》蔡自興《Machine Vision 課程講義》Wang Han(NTU)目錄:旋轉矩

接下來,我用我的思路(從老師學來的)證明下,為何有一個彈性對稱面的線彈性體其係數變為13個

第一個是縱向無聚束時,計算一定束長(幾百)的束透過一段行波加速管後,軸向加速電場表示式如下,計算出口處的能量分佈,與初始相位的關係等等
行變換隻能化為行最簡,列一樣5
8)進行微分,得到單斜、正交和橫向各向同性介質的彈性矩陣

解決過擬合的辦法:特徵降維新增正則化,降低模型的複雜度DropoutEarly stopping交叉驗證決策樹剪枝選擇合適的網路結構Q3對於線性迴歸,我們可以使⽤ Closed-Form Solution, 因為可以直接把導數設定 為 0,

entry(mtcars)# 對mtcars資料進行編輯,並儲存到新的MTcars資料檔案裡>MTcarsedit(mtcars)(若是要修改原資料集,前後資料名保持一致即可)# 也可直接對資料集進行修改>fix(mtcars)