基於UART的序列資料傳輸不需要使用時鐘訊號來同步傳輸的傳送端和接收端,而是依賴於傳送裝置和接收裝置之間預定義的配置

通常情況下, Bus-Width 總是會大於或等於 Channel-Width, 這樣能保證不會出現因 Master 與 Slave 之間資料交換的頻率比地址匯流排與 Master 之間的資料交換頻率要快, 導致 SSPBUF 裡面存放的資

封裝 SPI Flash(W25Q64)的命令和底層函式MCU 透過向 SPI Flash傳送各種命令來讀寫 SPI Flash內部的暫存器,所以這種裸機驅動,首先要先宏定義出需要使用的命令,然後利用 HAL 庫提供的庫函式,封裝出三個底層

無線模組一次可以傳送多少位元組

所謂裝置資訊集合,就是根據不同的外設尋找各自的外設資訊,我們知道一個完整的開發板有 CPU 和各種控制器(如 I2C 控制器、SPI 控制器、DMA 控制器等),CPU和控制器可以統稱為 SOC,除此之外還有各種外設 IP,如 LCD、HD

我們可以在 dump-capture kernel 下,獲得 coredump 檔案:$ cp /proc/vmcore 然後就可以在 PC 上使用 gdb/crash 來除錯分析了:$ arm-linux-gdb path/to/vmli
#define Dummy_Byte 0xFF// 任意值/*** @brief 讀取flash資料* @param* @arg addr:讀取地址* @arg readBuff:存放讀出的資料的指標* @
3、SPI和I²S主要特徵3.1、SPI特徵 3線全雙工同步傳輸帶或不帶第三根雙向資料線的雙線單工同步傳輸8或16位傳輸幀格式選擇主或從操作支援多主模式8個主模式波特率預分頻係數(最大為f_PCLK/2)從模式頻率 (最大為f_PCLK/2

下面這張表,是SD卡在SD模式(SDIO)下的引腳定義,右邊的兩欄是STM32F1xx/4xx系列微控制器的引腳,“4-bits Data”表示“四位資料傳輸”,“1-bit”表示“一位資料傳輸”:下面這張圖,直觀的表述了微控制器與SD卡的
第五個引數 SPI_CPHA 用來設定時鐘相位,也就是選擇在串行同步時鐘的第幾個跳變沿(上升或下降)資料被取樣,可以為第一個或者第二個條邊沿採集,這裡我們選擇第二個跳變沿,所以選擇 SPI_CPHA_2Edge第六個引數 SPI_NSS
再在硬體(spi)操控時啟用鎖定排程器,既可保證讀寫完整,又不影響其他不使用flash的任務執行

SPI 可以與肉中的肌原纖維蛋白(myofibrillar pro-tein,MP)在一定溫度條件下形成混合凝膠,研究表明天然的 SPI 與肉製品混合會使成品凝膠性下降,這是因為在肉製品生產中,中心溫度在 70 ℃左右,7S 和11S 蛋白

SPI 可以與肉中的肌原纖維蛋白(myofibrillar pro-tein,MP)在一定溫度條件下形成混合凝膠,研究表明天然的 SPI 與肉製品混合會使成品凝膠性下降,這是因為在肉製品生產中,中心溫度在 70 ℃左右,7S 和11S 蛋白

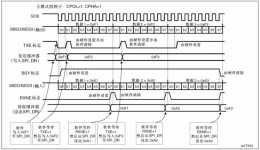
❞寫資料:讀資料:七、SPI 介面7.1、SPI 介面資訊7.2、SPI 介面時序SPI 介面時序詳細介紹,參考:【數字IC驗證快速入門】41、UVM專案實踐之APB_SPI(1)SPI協議重點回顧,要點提煉case1 的暫存器配置如下:C
例如一根SPI匯流排可以掛載多個裝置,DDR總線上也會掛載多顆DDR記憶體晶片,此時就需要CS來控制把資料發給哪個裝置,一般為低電平有效,也就是/CS表示

1.基本指標EV(BCWP):實現價值,實際完成工作的預算費用PV(BCWS):計劃價值,計劃完成工作的預算費用AC(ACWP):實際費用BAC:完工預算,專案總的估算費用BDAC:基準完工工期2、差異分析CV:費用偏差(CV大於0代表費用

而和BMC或者EC連線的LPC訊號、SMBus和GPIO,則透過在SPI總線上面加入傳輸層,將SPI匯流排作為管道(Tunnel)進行傳輸:一個多Slave的eSPI連線示意圖:結語驟然減少的Pin數對主機板和晶片都能起到節約成本的作用,e

}DMA接收完畢外部中斷NS配置:void Custom_SPI_DEVICE_Slave_EXTI_Config(void){GPIO_InitTypeDef GPIO_InitStructure

100KHz)- 應用程式SPI+除錯(UART、SPI)- 脈衝/方向介面效能描述:●帶有磁場向量控制(FOC)的伺服控制晶片- 轉矩控制模式- 速度控制模式- 位置控制模式- 電流控制重新整理頻率和最大的PWM頻率為100KHz (速度

100KHz)應用程式SPI+除錯(UART、SPI)脈衝/方向介面效能描述:●帶有磁場向量控制(FOC)的伺服控制晶片- 轉矩控制模式- 速度控制模式- 位置控制模式- 電流控制重新整理頻率和最大的PWM頻率為100KHz (速度和位置控