
org/openstandards/advancedtca/
這個系統中,某個模組的具體拓撲或基礎知識,如畫出電源模組採用哪種拓撲
查到ESP-WROOM-32的I2C如下圖,這個圖不是樂鑫官方的吧,你去官網看一下產品手冊

第五步:接收應答在傳輸完每個資料幀後,接收裝置將另一個ACK位返回給傳送方,以確認已成功接收到該幀:第六步:停止通訊為了停止資料傳輸,主裝置將SCL切換為高電平,然後再將SDA切換為高電平,從而向從機發送停止條件

更多精彩在公眾號:路飛的電子設計寶藏

所謂裝置資訊集合,就是根據不同的外設尋找各自的外設資訊,我們知道一個完整的開發板有 CPU 和各種控制器(如 I2C 控制器、SPI 控制器、DMA 控制器等),CPU和控制器可以統稱為 SOC,除此之外還有各種外設 IP,如 LCD、HD
下圖中傳輸的資料是0xAAh, 一般地址定義為7位(支援127種不同的IIC裝置,如果需要更多器件可以擴充套件地址),第8位表示讀還是寫,最後還會跟一個ACK或NACK,如果從器件A的地址為1010101,A說我現在有空,趕緊過來撩我吧,它
有兩個方法可以啟用 I2C:在命令列輸入sudo raspi-config開啟raspi-config的配置介面,選擇 “Interface Options”樹莓派 raspi-config 介面選擇 “I2C”啟動I2C,重啟樹莓派如果使
}第二步:初始化MPU6050之前介紹過,使用MPU6050實際上就是配置暫存器,這裡給出常見的暫存器地址:#define SMPLRT_DIV 0x19//陀螺儀輸出率的分頻,典型值0x07,(1kHz)#define CONFIG 0
3.1.3 9 個時鐘訊號I2C裝置進行讀寫操作的過程中,在從機鉗住匯流排的期間,MCU 異常復位,會導致 SDA 死鎖,異常產生出現在倆個階段:從機響應階段、從機發送資料階段
//SCL = 0}delay_us(2)

c/* 感測器資料修正值(消除晶片固定誤差,根據硬體進行調整) */#define X_ACCEL_OFFSET -600#define Y_ACCEL_OFFSET -100#define Z_ACCEL_OFFSET 2900#defi

在使用時,要先對其進行初始化,然後裡邊的DMP(數字運動處理器)就會將採集到的實時加計陀螺資料更新到暫存器中,只要用I2C通訊,根據指令讀取相應暫存器中的值就可以得到輸出的加計陀螺資料
相對地,還有“硬體協議”方式,STM32 的I2C 片上外設專門負責實現I2C 通訊協議,只要配置好該外設,它就會自動根據協議要求產生通訊訊號,收發資料並快取起來,CPU只要檢測該外設的狀態和訪問資料暫存器,就能完成資料收發
還要考慮電氣特性啊,另外協議精簡程度和速度其實沒有必然的聯絡,現代的很多超高速匯流排(像PCIE、JESD204啥的),協議層面非常複雜的各種匯流排的速度跟他們設計之初的目的有很大的關係,為了實現這樣的目的會做出很多的權衡,找到一個相對最優
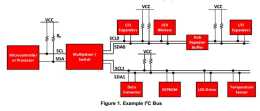
2 個(或多個)微控制器與 1 片 FRAM 接成多主 - 從的 I2C 匯流排方式,增加幾條握手線,即可得到簡單高效的通訊硬體電路