陀螺的進動,重力力矩使角動量方向改變產生進動,那如果我在陀螺的質心位置再施加一個沿重力的力會怎麼樣?
先放一下結論:對於一個正在做規則進動的陀螺,如果在其質心處施加一個豎直向下的恆力,那麼在一階精度下,
陀螺會做週期性的章動,其進動角速度和自轉角速度也會呈現出週期性變化;
這種週期性變化的振幅與施加的力的大小成正比,而週期與陀螺原本的自轉角速度成反比。
對一些基本的物理量進行定義:陀螺的質量為

,質心到固定點的距離為

,初始時刻與豎直線之間的夾角為

,重力加速度大小為

,陀螺的三個轉動慣量為

(假設陀螺繞自轉軸旋轉對稱),其中

是陀螺繞自轉軸的轉動慣量,在陀螺質心處施加的向下的力為

。
為了避免概念混淆,我們說一下陀螺運動的三個部分:
進動:陀螺繞著豎直線的轉動,體現為陀螺在地面上的投影做順時針或逆時針轉動。對應的進動角為

,進動角速度為

;
章動:陀螺與豎直線之間的夾角變化,體現為陀螺在地面上的投影長度變長或變短。對應的章動角為

,章動角速度為

;
自轉:這個應該最好理解,像地球那樣繞著自轉軸轉動。對應的自轉角為

,自轉角速度為

。
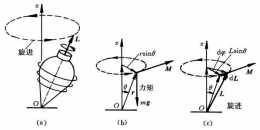
然後建立座標系。為了方便起見,我們如下圖所示建立一個隨著陀螺一起做進動和章動的座標系

,這樣的好處是

軸始終垂直於陀螺自轉軸且始終保持水平,

軸始終與陀螺自轉軸貼合。

設陀螺的角速度在這一座標系下的各個分量為

,
那麼陀螺的動量矩為

,
重力和外力
的合力矩

陀螺的進動角速度

章動角速度

自轉角速度

所以,隨陀螺做進動和章動的座標系
的角速度

因為陀螺的運動能被分解成進動、章動、自轉三部分,所以有

,即

也可以從(1)式中反解出


完成了上述準備工作,我們可以列出陀螺的動力學方程

,即

之後,對(3)式進行一些簡化,可以解出其一階精度下的解(相關假設以及解法放在回答的最後)
![\left\{ \begin{aligned} \omega_1&=-\dot\psi_0\sin\theta_0+\frac{Fa\sin\theta_0}{J_3\dot\varphi_0}[1-\cos(\frac{J_3}{J_1}\dot\varphi_0 t)]\\ \omega_2&=\frac{Fa\sin\theta_0}{J_3\dot\varphi_0}\sin(\frac{J_3}{J_1}\dot\varphi_0 t)\\ \omega_3&=\dot\varphi_0+\dot\psi_0\cos\theta_0 \end{aligned} \right.](https://img.heatask.com/upload/website_attach/+KxKR5+rc4f2dvJE+JQ9e2kv+sc911VWKhPKjceD36B=eBuNPPzDdZc1rVympSdPqvX6EskChKG5JxKhaiX9d5sDIgCnxBsFhOhrQcg9gPewJxot6NzCHUk2ksErKBU4wozvjbdYUFhlcuCE6NZBI1jD74G-2BUhwlX6EsjjgyI=N4p5aCV5-uyqKTC6w2RrfixthQ1C1IA=N4prZt0AzkyVKtDMh-N5eipOj4m7d0P2RyXsSFCEnwYE+scvpSIvpCbm_9kSg4P2QYMnGsVvUPk4kaY-2RUux3X6EsAEQ0P0QvfTeZP8eYMx8tDM2_kFhOwM3X+C1BIqJxbOdo5Ad5C+4TCuhhUix3X6EsjjgyI=N4p5aCV5-uyqKTC6w2RrfixthQ1C1IA=N4prZt0AzkyVKtDMh-N5eipOj4m7d0P2RyXsSpz9fQkzjgC6w1Zheh2M3ukqz5I=N4wNP7nobiBD_uDMh-NXIowM3X4sgzVUa2CnG4E4nw6urVympSVAqvX6EseAhy-gX_2NGFcA03TD_X2yI2QFhOh7idkYifGeMyXQSDV5-5-s7gC6w2Bi+gHOxVgNgKfyJxbOfKQAI1C+4grMh-NFIIwM3ukS_fG7b1bb6NICohk2ktwZf1h31tBLi.jpeg)
再透過(2)式,我們可以得到陀螺進動、章動、自轉的情況(同樣是精確至一階精度)
![\left\{ \begin{aligned} \dot\psi&=\dot\psi_0-\frac{Fa}{J_3\dot\varphi_0}[1-\cos(\frac{J_3}{J_1}\dot\varphi_0t)]\\ \dot\theta&=\frac{Fa\sin\theta_0}{J_3\dot\varphi_0}\sin(\frac{J_3}{J_1}\dot\varphi_0t)\\ \dot\varphi&=\dot\varphi_0+\frac{Fa\cos\theta_0}{J_3\dot\varphi_0}[1-\cos(\frac{J_3}{J_1}\dot\varphi_0t)] \end{aligned} \right.](https://img.heatask.com/upload/website_attach/3YrJjiXlV2YJ4evIyguwN_soyRPpcRELuEbJiGVTMJtr5oRn8806CHBITrm8UrybDMMKlQjkCIq7tss9AGCwCRe9zc8JDcJVdsfP_R5k9FGA3dHnV7zoWj39H9cC_S4VdsfNjQnuWGerb=fYOgM5_rP0=hXr1j4VdZExz+Xk9FGC2eqn880eB0iCgiVQdctRprMKl7pw_DC8HdgHiqT+_rDLzA=5g+tRolOTdf=Q5GEJ7EOhVpAf5csJtRonQctjoc4sjF8FNNXA49MG9pAd5csJt+8+l+JVdsfP_R5k9FGf1Z0bApAH96s5=c8+lRCf1EiL1_jgBlE+7efUNKAd4S4Wz0o5zIqVdZqL1_j=A3arb=fENR=o998Ky0=Aii7vgrM7Db=_4JGV22MG9bAd4RB4yHzr1j_l0miL1_5k9fS-GHan8_=o998OhSnr199Q1FENihnuWesry4Hn88co99VZTrm8hik_lu0MQgqePd4VtsDdiq0q_rDLziPfUrEWuWb5jh1AA3LryEDn880ZPho=Tr5GDhoVdsfl_RXk9FGf1Z0bAmZD_rPMTr5GEWx+lu0MhhVi_DC84YbGOhuwAIp9Hjnr19iLz5MKlQL-P2E2c9Mc3QgHBHV9Hj=-zIWVdZqL1_j=A38rbbqn880FOS39H9cIg0_93XYTdi5kWsBrb=qxiqOpCHeOTr5GgHlB2bwLhb=Q5Gnrb=fGCGjUycd81.jpeg)
其中

分別是陀螺做規則進動時的進動角速度和自轉角速度。
所以,對於一個正在做規則進動的陀螺,如果在質心處施加一個力
,那麼陀螺運動情況是:
對於進動部分,進動角速度

呈餘弦變化,且

。這說明,進動角速度會因為力
的出現而減慢;
對於章動部分,可以再做一次積分,得到章動角
![\theta=\theta_0+\frac{J_1Fa\sin\theta_0}{J_3^2\dot\varphi_0^2}[1-\cos(\frac{J_3}{J_1}\dot\varphi_0t)]\leq\theta_0](https://img.heatask.com/upload/website_attach/gMEfcGanm1X5_1_nSfvng2F2y3G891BT_xGfaVYszIsEj=+82C1Gg1NMyRF9z.jpeg%3D%5Ctheta_0%2B%5Cfrac%7BJ_1Fa%5Csin%5Ctheta_0%7D%7BJ_3%5E2%5Cdot%5Cvarphi_0%5E2%7D%5B1-%5Ccos%28%5Cfrac%7BJ_3%7D%7BJ_1%7D%5Cdot%5Cvarphi_0t%29%5D%5Cleq%5Ctheta_0)
。這說明,章動角會因為力
的出現而增大,或者說陀螺的傾斜程度會增大。
對於自轉部分,自轉角速度也會出現週期性變化,且

。這說明,自轉角速度會因為力
的出現而加快。但由於高速轉子的自轉角速度一般都很大,所以在實際物理過程中,這種週期性的變化表現得並不明顯。
力的大小影響週期性變化的振幅,週期性變化的快慢由初始時刻的自轉角速度確定。
光看錶達式可能不太直觀,我們可以根據上面的計算結果,畫出一個做週期性進動章動的陀螺。(黑色線段代表陀螺,灰色線段是陀螺在水平面上的投影,藍色曲線是陀螺末端的軌跡,橙色虛線是豎直線)

最後我們詳細解一下陀螺的動力學方程(3)。為了把方程統一表達為關於

的表示式,我們將(2)式代入(3)式,整理得到

接著,我們對方程(4)進行一定的簡化。對於規則進動的陀螺轉子,我們一般認為其自轉角速度遠大於進動角速度,即

。延續這一思路,我們可以把角速度分量

及其導數視為一階小量(即認為陀螺進動和章動的幅度、速度、加速度等比較小),把方程(4)進一步化簡為(保留至一階量)

那麼在這一假設下,重力

和外力
的量級是多大呢?我們可以從(5。2)式中看出,基於
是一階小量這一假設,
和
也是一階小量。需要特別說明的是,這裡的一階小量並不意味著外力
一定要很小,而是說外力
與重力
在同一量級上,並且它們的效應相較於陀螺自轉的效應

而言比較小。這與規則進動陀螺轉子要求
是等價的,所以並不影響我們把後續的計算結果運用到實際情況中去。
根據(5。3)式,我們可以得到

把(5。2)式對時間

求導,可以得到

再將(5。1)式和

代入(7)式,得到

略去二階小量,整理得到關於

的方程

方程(9)的解是三角函式的形式。再考慮到方程的初值

,可以解出

將(10)代回(5。1)式,再結合初值條件

,可得
![\omega_1=-\dot\psi_0\sin\theta_0+\frac{Fa\sin\theta_0}{J_3\omega_{30}}[1-\cos(\frac{J_3}{J_1}\omega_{30}t)]\tag{11}](https://img.heatask.com/upload/website_attach/fiU511GvNc9_Ij1gK0cs8Hoi84MUO5VLJGN5HYMjb_RwJkgQgkWi9W8v8XL8swNX0pVuK4TQ2YUh-jXXfYE61T8Tm4ESswVWJhQB20B2OYUc-IpNU5LXqWNSV26zGUUjURzL0jxzK_RDdm6ZcixRx0JSV26tmiMVg8zD0YXtm98wzhuX1P7yeCoz+Oxi6SExoqZCm4MbvnIjno9Req4aqyozfWr5PhURwbVsKWr2O7U_UZpNU5FjrW1brgxj6SM9oqIN2Oxaa7UhUZpNUuIaryozfRA8swdXb.jpeg)
我們現在已經得到了

的表示式(6)(10)(11)。最後,只需要透過(1)(2)式,將

和

進行代換,並保留至一階小量,就能得到我們上文中的結果了。