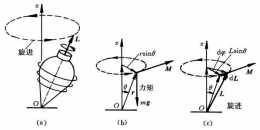
好了,現在自轉角動量有了,力矩有了,問題變得和開始的陀螺進動相同:根據角動量定理,鏢必須在往前飛的同時再做一個旋轉,邊飛邊轉,轉了一圈後就回來啦

然而不久前,一款名為 LIMBO 的機械陀螺以持續旋轉 27+ 小時(也就是幾百個 5 分鐘)打破了吉尼斯世界紀錄,成為當之無愧的陀螺舞王

在指蓋內裡處還篆刻有“限量珍藏版”的字樣,這款陀螺釋出於2017年,丁酉雞,五行屬火浴火鳳凰倒也恰如其分

0版本)傳統的轉筆,悠悠球,已經沒有更多的新意和創新,指尖陀螺是2016年火於INS上的一個EDC玩具,它的帶頭人是被國內玩家譽指尖陀螺為“鼻祖的”Torqbar(MD工程公司),其實我並認為他是鼻祖,其實這款產品在之前就已經有高階的品牌設
如果把牛頓水桶和導航陀螺兩者放在一起,讓陀螺軸垂直於吊繩,按馬赫的解釋,當水面是平的時,水相對於陀螺軸一定無轉動,當水面是凹狀時,水面相對於陀螺軸必有轉動,這也可以實驗驗證
福瑪特F-SLAM III 慣導系統採用全座標演算法控制(Full Coordinate Arithmetic Control),依靠主動輪組上霍爾系統精準控制機器在行走過程中的全過程座標定位(無論機器走到哪裡,機器都能準確知道自己當下的準
3 陀螺的溫飄特性MEMS的陀螺儀的零偏是會受到環境溫度的影響產生變化的,直觀感受就是,筆者曾經在夏天,進行飛行測試時,由於飛控上面無遮擋,當飛行一段時間後,飛控不能回平了,也就是說,溫度變化的情況下,解算的姿態角資料有偏差了,本質是上電校
一、遊戲運營套路噱頭:分紅龍、陀螺幣(TLBC)分紅龍,透過金幣養龍升級合成換取,官方宣稱全網限量10萬隻,目前一隻分紅龍收益分紅100元左右,也就是說,獲得分紅龍之後躺著也能賺錢
為了解決單目VO的這一先天缺陷,最廉價的做法為加入IMU,同時使用IMU和相機來進行狀態估計,由於IMU可以測量系統加速度,從而帶來速度上的約束,於是尺度變的可觀,舉個例子:代表連續的三幀,分別對應的位移為,假設三個位移與真實的帶有物理意義

陀螺與著名的日本動畫導演押井守、大友克洋、高畑勲、樋口真嗣等私交甚篤(小島秀夫還洋洋灑灑寫了7000字讚賞《水形物語》),更別說他是個徹頭徹尾的「機器人」與「怪獸」迷
2 沒有主見我剛剛說了,交易是個圓盤,不同的人,不同方向都可以指向圓心,你要聽了別人的指導,基本也是回到原點

cc &
IFOG為主要慣性元件的捷聯慣導系統,可為飛機提供三維 角速度、位置以及攻角和側滑角,實現火箭升空發射的跟蹤和 測定,也可用於空間飛行器穩定、攝影/測繪、姿態測量控 制、運動補償、EO/FLIR穩定、導航及飛控等,其中高精度、 可靠性高的光

計算可知,這個圓周運動是滿足一下式子的:該式說明,陀螺的進動角速度與外力矩 M 成正比,與陀螺的自旋角動量 L 和其與 z 軸夾角θ 正弦 sinθ的乘積成反比

可以看出和是迴圈座標,對應著兩個首次積分和,帶入 Lagrange 方程,有據此可以解得和,再帶入系統能量表達式記,它也是一個守恆量,並且記我們引入的一個重要的量是所謂的有效勢能以及皆為常數,由第三式得到,記等式右端為,該等式左端要求此外簡
),我們希望的是從直覺上對這種現象有一個基本判斷(就像你一腳踏空就會摔倒一樣直接,但是在這裡轉身並不會避免摔倒的尷尬)

1、陀螺運動問題與我們的生活聯絡緊密飛機陀螺導航原理從飛機導航到衛星定位,從地球自旋到電子自旋磁矩的出現,都與陀螺運動存在密切關係,特別是磁陀螺運動,更將牛頓萬有引力從靜態研究代入到動態分析之中去了,同時也使我們的探索觸角向微觀世界延伸

內環軸與外環軸是為陀螺增加的兩個自由度定軸性:高速運轉的剛體在不受外力矩的作用下旋轉軸方向相對慣性空間不變進動性:陀螺儀轉子高速轉動時,陀螺儀內環軸方向受力後,陀螺主軸繞外環軸轉動

上述結果說明,當轉子陀螺的角動量與地球的自轉角速度間的夾角時,地球上觀察到的轉子陀螺自轉軸以的角速度做旋轉,旋轉所形成的曲面為一圓錐面,對稱軸平行於地軸,半錐角為,陀螺的這種運動稱為表觀運動

功耗得到了極大的控制,整個裝置異常省電,是的你沒聽錯,磁懸浮是很省電的,還是因為改良的控制演算法,使用了多個閉環控制,其中包括一個電流環,也就是說演算法會調節浮子到一個合適的位置,而這個位置的磁力(不包括線圈的力)是和重力完美平衡的,這樣就