噴塗機器人又叫噴漆機器人,是可進行自動噴漆或噴塗其他塗料的工業機器人,噴塗機器人屬於噴漆行業種類,主要由機器人本體、計算機和相應的控制系統組成,多采用5或6自由度關節式結構,手臂有較大的運動空間,並可做複雜的軌跡運動,其腕部一般有2~3個自

在二自由模車輛模型中,橫向、橫擺執行動力學公式如下:對於三自由度模型,新增的縱向運動學公式如下:這裡的縱向力暫時僅考慮前輪側偏力的分力以及滾動阻力,搭建的simulink模型如下圖:如果需要考慮其他的縱向力,例如驅動力、制動力等,也可以直接

說到這裡,看官可能會看出來了,哎我懂了,我的末端機構有6個自由度(三維位置,三維旋轉),而胳膊作為一個機械手,有7個自由度,這兩個自由度好像說的不是一回事,但是數量上7-6=1,所以這1個自由度我能拿來擰鑰匙
定位:使一批工件在機床上或夾具上相對於刀具處在正確的加工位置的操作過程

兩個樣本的容量都很小[1]第一個假設條件,如果總體服從正態分佈,那麼在和已知的情況下,樣本均值也服從正態分佈:顯然,根據“獨立正態隨機變數的線性組合仍然服從正態分佈”這條性質,這兩樣本均值之差也服從正態分佈:那麼,化為標準正態,則為:特別,
與發現高斯分佈(正態分佈)一樣,開始的開始只是一個巧合,即統計學家發現從正態分佈中抽取樣本(比如身高),然後取身高得平方,再之後神奇的事發生了,這個由樣本值取平方形成的分佈與以往的正態分佈不同,而且透過一頓實驗與統計計算,發現這個分佈的引數

為了減少衝擊,皮帶滑座連線機構帶有橡膠緩衝裝置,這很大地延長了同步帶的使用壽命,常規來說,同步帶使用了五年之後依然不需要重新張緊

靜態複雜度的第三個引數:旁消係數旁消係數:破除”冰塊”需要的旁消次數對關卡造成的影響圖中的冰塊障礙是個特殊的障礙,玩家透過在它的旁邊產生消除來破壞這個冰塊,那麼問題來了,這個冰塊到底算一個普通障礙還是算一個方塊元素,明顯它是關卡中動態變化的
而這基於以下結論:若在某個參考系S中,某剛體有一個“剛體上的定點”靜止,那麼該剛體在任一瞬間的運動可以看作繞某個透過上述定點的瞬時軸(“瞬時”的含義即對應軸可能隨時間變化)的轉動

紅色是活動構件n=6,黃色是低副只有轉動副pl=7,綠色是高副ph=3複合鉸鏈是D區域性自由度是C H滾子,處理方式焊接虛約束是杆8引起的約束,處理方式為去掉杆8及與8有關的運動副自由度F=3n-2pl-ph=18-14-3=1下面是我自己

估計作者是看了兩天教程,連RPG都沒玩過幾個,就想做出點東西的高中生,用著預設素材,幾個yep外掛就覺得自己豔壓群芳了,一副愛玩不玩的態度,有問題就甩鍋遊戲引擎,談美工就說資金不足,你讓其他獨立遊戲人怎麼說
讀心理學,其實可以考慮找一些心理學的機構、診所、培訓學校找工作,裡面可能會有適合的工作,例如助教,做幾年,獲取一些經驗後,可以考慮一下心理諮詢,然後逐漸轉成自由職業者,自由度高
因為我們在做正態檢驗時,要使用到平均數和標準差以確定該正態分佈形態,此外,要計算出各個區間的理論次數,我們還需要使用到N

這裡貼上《Multiple View Geometry in Computer Vision》一書中關於射影對映的定理:中文版:這種對映關係用齊次座標的形式表示如下:其中,是一個齊次矩陣,也就是說有意義的僅僅是元素的比值,因此 H 有八個自
右邊四個,一個空間活動構件有六個自由度一個圓柱副限制四個,兩根圓柱銷平行所以本身限制的自由度一樣,但也帶入了一個新的約束即軸向的轉動
在伽利略牛頓建立物理學的時期,透過觀察發現,如果假設物體只是一個質點,或者一個光滑而均勻的球體,那麼該物體自身的任意轉動,如果僅僅考慮物體運動學的觀察,是不會影響物體相互運動關係的描述的
一開始我是從排行榜上看到的,閒的無聊就點開了,然後被裡面的人物吸引了,每個人有各自的背景身世,以及不同的性格
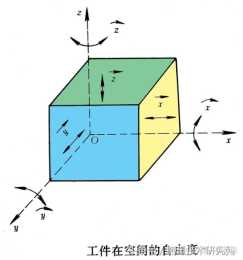
關於以上問題,我覺得要從以下幾個方面來理解:1)幾“點”不能簡單理解為幾個接觸點工件定位的實質是使工件在夾具中佔據某個確定、正確的位置,使得工件的六個自由度得以確定

劣驅動機械臂節能的劣驅動機械臂一般來說,我們見到的機械關節,都是由電機在驅動控制的,大多是驅動數≥自由度的關係
1)操作力(也稱為手臂力或負載)是指抓住和握住工件的重量