
早期飛行員坐在飛機上用繩索操縱翼面圖片來自:Aircraft Systems Ian Moir Allan Seabridge隨著飛機設計水平的不斷提高,飛行時需要控制的翼面也越來越複雜,但是直到電傳飛控出現以前的很長一段時間內,都是依靠繩
由於多旋翼飛行器本身是一種不穩定系統,要對各個電機的動力進行超高頻率地不斷調整和動力分配,才能實現穩定懸停和飛行,所以,對於航拍無人機來說,即使最簡單的放開搖桿飛行器自主懸停的動作,也需要飛控持續監控這15個量,並進行一系列“串級控制”,才

無人機的通訊鏈路有兩種用途,一是控制無人機位姿(無線遙控),如DJI航拍無人機採用遙杆遠端控制移動方向,另一是回傳資料並接收任務指令(資料傳輸),如Pixhawk系列飛控回傳姿態角、GPS位置、氣壓計高度值等資料,並從地面站軟體接收飛航模式
我們上一版基於stm32f4的固定翼/多軸飛控,ahrs解算頻率在300hz左右,目前正在開發的,基於完全相同硬體平臺,引入freertos的新一版飛控軟體,ahrs解算頻率輕鬆接近4000hz,且沒有對演算法及cache進行刻意最佳化

穿越機遙控器上的操作通道,即油門/yaw/pitch/roll,除了名字和普通無人機對應外,操作手感上毫無相似點
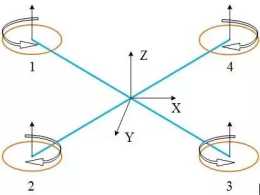
最近翻看飛控和導航的書發現,在有關飛控的書中導航繫到機體系旋轉矩陣多為:導航書中多為:主要原因在於它們所選擇的座標系不同,在控制中選擇的座標系多是北東地和前右下,而且大部分飛控程式中用的是飛控這一套旋轉矩陣,而導航中多選用東北天和右前上
這種方案的四軸其實適合用來學習STM32,整個過程需要你使用AD或者Cadence、PADS等或者其他一些開源PCB軟體畫出四軸的pcb板,然後買元器件,焊接除錯,接下來就是STM32程式的編寫,主要涉及到1、底層驅動程式,如電機驅動、陀螺
題主應該說的就是festo公司的那款smartbird吧,它透過振動雙翅產生可以分解到豎直方向和水平方向的氣動力,也就可以認為一個是升力一個是推力
說一點題外話,目前用fpga做飛控的,其實還是用zynq這類異構平臺,演算法部分其實還是要跑在arm核上面,用fpga來做,工程量大,得不償失,zynq的優勢,無非就是介面可以定製,介面可定製性,其實在小飛機上沒什麼區別,更多的是針對一些有

第一步 夯實基礎導航和飛控演算法設計都是屬於理論性比較強的工作,需要大家掌握比較好的數學基礎,所以,不要妄想直接學習怎麼搭建控制器,這跟武俠小說中學習上乘武功是一樣的,首先需要練好基本功,把內功練好了學具體的武功招數不僅快而且能夠發揮最佳效
pixhawk是基於stm32的Arduino DUEstm32能夠勝任,遙控的通訊用nrf24l01,姿態狀態用mpu6050先給你推薦一些網站:DIY DronesAPM飛控/Pixhawk飛控ArduPilot | Open sour
因此,在17年開始,客戶只相信自己在自家田地裡親眼看到無人機的作業效果以及產品效能,不再會過分相信植保無人機廠商的宣傳資料、作業影片等,他們對植保無人機的態度越來越謹慎,將自己的口袋看得也越來越牢,植保無人機廠商想要從他們口袋裡掏出錢,那就
哈哈哈,這哥們終於做出來了啊·········不知這個機架單賣不··組個別的玩 也是極好的————————-跑去看了一遍直播的帖子,P3畢竟還是P3啊,這樣子暴改了,穩定性真的難說啊·······不過P3改大機的很多,改小機的確實很佩服這個
首先GPS模式GPS是參與工作的,遙控器是不是沒有居中,尤其是微調,如果沒有居中會一直給飛控一個訊號,這樣飛機就會向一個方向飄
卓翼智慧ZY-HELI-FCS無人直升機飛控是基於Xilinx Zynq-7000處理器設計的全功能的工業級無人直升機飛控與導航控制計算機,具有手動、輔助、自主三種飛航模式,可實現一鍵起飛、降落、返航、任務規劃等功能
3 陀螺的溫飄特性MEMS的陀螺儀的零偏是會受到環境溫度的影響產生變化的,直觀感受就是,筆者曾經在夏天,進行飛行測試時,由於飛控上面無遮擋,當飛行一段時間後,飛控不能回平了,也就是說,溫度變化的情況下,解算的姿態角資料有偏差了,本質是上電校

一、硬體S500機架:1套富斯I6遙控器:1套(配IA6B接收機,刷10通道韌體)富斯電壓回傳模組:1個Pixhawk飛控:1套(含飛控1個,蜂鳴器1個,安全開關1個,電流計1個,記憶體卡1張)減震板:1個M8N GPS+摺疊支架:1套35
就算對方弱到幾乎沒有空軍,國家放開讓殲15讓你打,以殲15的出勤效率和載彈量,投送能力很堪憂

飛行器姿態觀察模型以上模型的俯仰、滾轉、航向如有不對應,需要進入“配置”頁面的飛控和感測器方向欄進行設定,透過選擇不同的加速度計安裝方向角資料,修正安裝角度差異,儲存重啟後再次觀察這個模型,直到姿態和飛機真實變化方向一致為止
4、電機對於電機大家不必去了解太多,只需要知道電動無人機上多用的是無刷電機,然後從大到小有各種型號,比如說小飛機常用的2212電機,大點的4008,數字越大肯定就越厲害,對應的功率就大些,P=UI這個相信大家都知道,所以電機的大小直接決定了