
電動機轉矩、轉速、電壓、電流之間的關係:由於電功率P=電壓U*電流I,即P=UI————公式【6】由於公式【2】中的功率P的單位為kw,而電壓U的單位是V,電流I的單位是A,而UI乘積的單位是V

現實中磁場的強弱就是可調節的,因為外部的旋轉磁場是由三相電流產生的啦,所以透過控制正弦電流的幅值你就可以調節磁場的強弱啦~有的同學可能會有一個問題,那麼對於永磁電機來說,裡面的磁鐵是不是應該保持不變呀

2.啟動轉矩當給處於停止狀態下的電動機加上電壓時的瞬間,電動機產生的轉矩稱為起動轉矩
步進電機失步原因及解決方法1、轉子的加速度慢子步進電動機的旋轉磁場轉子的力速度慢於步進電動機的旋轉磁場,即低於換相速度時,步進電動機會產生失步

交流伺服電機與步進電機相比,即使在高速領域亦能獲得穩定的高轉矩

非凡禾禾為您推薦張棟樑教授團隊臨床經驗:不拔牙病例整體內收前牙過程中,我們希望牙冠產生更多的冠舌向的負轉矩,但是往往會發現整體內收前牙過程中轉矩控制特別好,前牙不容易舌傾,此時可考慮選擇五連簧,作用於前牙的切端,同時3~3橡皮鏈連扎,做支抗

XW540-T260-R防水舵機,圖片來源於北京智慧佳機器人
以正轉為例,速度調節穩定狀態下突加反向負載,實際速度相對於指令下降,調節器輸入速度誤差為正,故輸出轉矩產生正增量,經過多拍調節,加速度為正,電機轉速回升
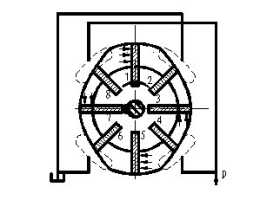
1、葉片式液壓馬達由於壓力油作用,受力不平衡使轉子產生轉矩
這個功率對應的是當前驅動電壓下能維持最大轉矩的最高轉速(就是拐點那個位置)設計電機的時候肯定要先知道你的效能需求
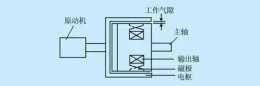
圖4 兩臺非同步電機透過滑差電機對拖法示意圖本方法可以透過在勵磁線圈上載入直流電壓來調節負載大小,也可以透過調節兩臺電機的相對速度來調整負載大小
這種情況下要產生穩定的轉矩,要求兩個磁場保持相對靜止,可以是同步旋轉(交流電機),也可以是都靜止不轉(直流有刷電機),還可以是平均意義上的相對靜止,一個轉一個跳,BLDC電機
液壓泵壓力液壓泵(或馬達)工作壓力是指泵(或馬達)在實際工作時輸出(或輸入)油液的壓力,由外負載決定

天機傳動廠家生產的磁粉離合器制動器可配張力控制器一起使用,並且磁粉離合器制動器採用DC24V直流電壓,可以帶法蘭盤,也可以帶軸連線,適與張力控制器配套使用,廣泛應用於印刷、包裝、紡織、造紙等機械的材料收卷、張力控制、連續滑動、緩衝起動
驅動轉矩功能提供了強大的起動轉矩,在穩態運轉時,轉矩功能將控制電動機轉差,而將電動機轉矩限制在最大設定值內,當負載轉矩突然增大時,甚至在加速時間設定過短時,也不會引起變頻器跳閘

反應式步進電機內部結構示意圖如下:1.3.3、混合式(hybrid stepper motor)顧名思義,混合式步進電機結合了永磁式和反應式步進電機的優點,它的轉子採用永磁性材料,並且將其分成南極(S極)和北極(N極)兩個部分,每個部分又有
我們前面計算得到的轉矩單位為Nm然而,TB商品詳情找到的電機引數列表中,可能的單位有Nm、Kg.m、kgf.cm、gf.cm、Kg.cm、g.cm等等,只關注數值大小可不行
然後可以分兩個步驟來辨識轉動慣量和負載(你的電機必須得有編碼器,否則就困難了):第一步:控制電機勻速轉動,這時候轉動慣量那一項就是0,通過幾組不同的轉速(轉速可以根據編碼器的反饋至,透過閉環進行控制),就可以求出負載轉矩和粘滯係數
VPf控制的變頻器驅動非同步電機時,在某些頻率段,電機的電流、轉速會發生振盪,嚴重時系統無法執行,甚至在加速過程中出現過電流保護使得電機不能正常啟動,在電機輕載或轉動慣量較小時更為嚴重
一、伺服系統,大致上可分為下列幾項:1、指令部分:動作指令訊號的輸出裝置2、驅動部分:接收指令部分的輸出,並驅動執行機構(比如電機)動作的裝置3、反饋部分:檢測執行結構或者負載狀態的裝置4、執行機構:接收驅動部分的輸出訊號產生轉力矩、位置等