
但是直升機相對更復雜一點,需要改變旋翼槳盤的角度+拉力(改變拉力是為了維持高度)固定翼的操作:操縱桿,油門,方向舵直升機的操作:總距杆,駕駛杆(操縱桿),腳蹬(方向舵),油門那直升機的油門又是拿來幹啥的,我們的整體變距杆(總距杆)控制了主旋
由於多旋翼飛行器本身是一種不穩定系統,要對各個電機的動力進行超高頻率地不斷調整和動力分配,才能實現穩定懸停和飛行,所以,對於航拍無人機來說,即使最簡單的放開搖桿飛行器自主懸停的動作,也需要飛控持續監控這15個量,並進行一系列“串級控制”,才

”“《簡明不列顛百科全書》第9卷寫道:“直升機是人類最早的飛行設想之一,多年來人們一直相信最早提出這一想法的是達芬奇,但現在都知道,中國人比中世紀的歐洲人更早做出了直升機玩具
我理解你的意思是在固定翼飛機的螺旋槳位置增加這些裝置,透過改變飛機拉力線的方式,實現類似現在向量發動機的效果

如果主要想玩的是跟拍功能那麼選擇有:Ghost 智慧空中機器人(帶相機,雲臺 )#FormatImgID_15##FormatImgID_16#Ghost 智慧空中機器人華科爾X4 (不帶相機)Scout X4_Scout X4_GPS 飛

然而,根據傳統旋轉翼飛機的飛行原理,當直升機的旋轉翼速度過快時,前進葉片往往會產生激波,而後進葉片會失速

香蕉仗著自己皮厚倖免遇難,但被無人機旋翼打的部分,也成了香蕉泥了
有效則指的是這才是實現起來效費比最高的設計,如果為了那一點點最後的效率提升,做了傾轉旋翼或者機臂摺疊等措施,要做到原設計的可靠性,體積,重量和成本都會大幅度提升,在這麼小的飛機上這麼做得不償失
三、(反扭矩)踏板在直升機懸停時,透過操縱反扭矩踏板(不是腳舵)使直升機轉向

歡迎大家提出在多旋翼飛行器開發過程中遇到的問題以及感興趣的技術方向,若在本人能力範圍內,後續會更新相關技術分享

下圖為某型直升機正常垂直起飛過程的飛行軌跡和有關操縱量的變化↓超越障礙物起飛這種起飛方式是在場地周圍有一定高度的障礙,並且場地比較狹小時採用

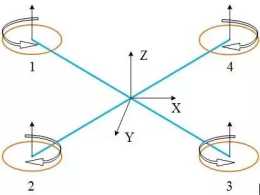
旋翼總升力翻滾運動翻滾運動是在保持四旋翼無人機前後端旋翼轉速不變的情況下,透過改變左右端的旋翼轉速,使得左右旋翼之間形成一定的升力差,從而使得沿無人機機體左右對稱軸上產生一定力矩,導致在方向上產生角加速度實現控制
魚鷹的特點在於,它是直升機,因此需要巨大的旋翼,這樣的話兩臺發動機不能靠得太近,否則旋翼會打架

空氣分子,就彷彿是好多好多小球,當旋翼在空氣中旋轉起來時,旋翼會不停的將空氣分子壓向下方,而空氣分子也會對旋翼產生向上的壓力,這個壓力就為直升機提供了升力
輕型多旋翼無人機:空機重量介於4-15KG,起飛全重介於7-25KG

整體佈局:貝爾Nexus採用了可傾轉涵道6旋翼結合短機翼和尾翼,很顯然借鑑了貝爾駕輕就熟的V-22的傾轉旋翼設計,理論上,傾轉旋翼佈局用一套動力系統既能夠完成垂直起降,也能夠完成平飛巡航,比普通多旋翼佈局續航方面更有優勢,加上採用了涵道旋翼
旋翼機的特點:1)是直升機成本的十分之一2)能執行90%的直升機任務3)不會失速4)在極慢和極低的飛行中保持穩定5)低油耗6)即使在強風和強氣流中也能保證高度的安全性7)經濟型飛行員培訓8)短距離起降9)能在極低速情況下著陸10)即使發動機

魚鷹傾轉旋翼機已經服役23年,如果看總飛行時間,它的事故萬時率甚至低於普通直升機,介於CH-47和CH-53之間,是比較安全的

直升機的駕駛杆可以操縱旋翼槳盤的傾斜方向,進而控制直升機的飛行方向,固定翼飛機上的駕駛杆則是用來控制固定翼飛機的副翼和尾翼

Agility and Maneuverability(機動性)考慮四旋翼的Agility時,可以考慮兩方面:Maximum Velocity to Rest (Minimize stopping distance) 最大化加速度Turn