在下面的分析中我將使用如下記號,假設人是一個均質長方體,質量為M,鞦韆板子的質量為m,鞦韆繩子的長度為L,人的高度為h,人的轉動慣量為 I_M,鞦韆板的轉動慣量為 I_m (都是以各自質心作為旋轉中心)如下圖所示 【補充2:這裡的分析主要基

實驗目的1) 瞭解威尼爾向心力實驗套件的使用及測量原理2) 瞭解向心力與角速度之間的關係3) 驗證向心力與角速度之間的關係式Vernier 向心力套件實驗原理威尼爾向心力實驗套件透過橫樑旋轉提供圓周運動,同時帶動下方的圓盤光柵旋轉,利用光閘
分析b軸上的運動,把第三個尤拉方程代入第二個求二階導後捨去小量後的結果得到這是一個形如形式的方程,解是正餘弦,不隨時間發散分析c軸上的運動,把第二個尤拉方程代入第三個求二階導後捨去小量後的結果,同理得到,同樣解不隨時間發散因此我們得到b和c
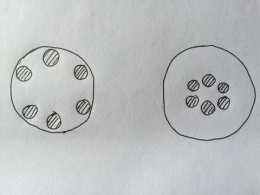
也就是說,把這個物體分成很多微小的等份,每一等份的質量乘以距離平方的和就是轉動慣量,這樣就能解釋為什麼上圖右邊那個轉動慣量小了,右圖的質量分佈更集中於轉軸,雖然m(i)相同,但是r(i)更小,所以乘積的大小更小,所以轉動慣量也更小

首先我們來看看EVE炮臺的命中率究竟是如何計算的:大家無需糾結這個公式究竟要如何代入遊戲,畢竟EVE是個遊戲而不是高數作業,我們只需要透過這個公式明白,跟命中率有關的要素簡單來說有如下幾個:角速度、訊號半徑、炮臺跟蹤速度、最佳射程與失準距離

計算可知,這個圓周運動是滿足一下式子的:該式說明,陀螺的進動角速度與外力矩 M 成正比,與陀螺的自旋角動量 L 和其與 z 軸夾角θ 正弦 sinθ的乘積成反比

內環軸與外環軸是為陀螺增加的兩個自由度定軸性:高速運轉的剛體在不受外力矩的作用下旋轉軸方向相對慣性空間不變進動性:陀螺儀轉子高速轉動時,陀螺儀內環軸方向受力後,陀螺主軸繞外環軸轉動

鐳射陀螺實際上是一種環形鐳射器,沒有高速旋轉的機械轉子,但它利用鐳射技術測量物體相對於慣性空間的角速度,具有速率陀螺儀的功能

你是不是覺得,手機陀螺儀就是把機械陀螺儀縮小了裝在手機主機板上的,其實我也是這麼想的,但永遠不要低估科技的力量,現在都發展到有鐳射陀螺儀,光纖陀螺儀,以及微機電陀螺儀,,雖然還叫陀螺儀,但其原理跟機械陀螺儀完全不一樣,↑↑↑的原理是利用光程

% 驗證一下,M_gyro_inv_ * M_gyro_inv應該是單位矩陣fprintf(‘M_gyro_inv_ * M_gyro=\r\n’)disp(M_gyro_inv_*M_gyro)fprintf(‘M_gyro_inv_ =
圖2 定點轉動剛體某一時刻的定軸轉動記這個距離為,則最終可以簡化為:,這是個標量式,而這個動量矩的方向自然是沿著軸的,因此完整表示為:由於這是把動量矩分解到了角速度方向上,因此它符合,而上式中的,它的確有轉動慣量的量綱,就是
舉例:當前條件輪胎和地面摩擦力在某轉向角度下極限是80km/h,在低於這時速下,車輛軌跡幾乎一樣

尤其是除了氣候,還有其他許多因素會導致地球自轉週期的短期變化,比如其他天體對地球的引力影響、地球上的岩漿活動、人造衛星的發射等等
(建議閱讀最新版本)預備知識剛體, 角動量定理剛體的繞軸轉動若剛體繞固定軸轉動, 那麼剛體的位置只需一個變數即可完全確定(一個自由度), 我們令該變數為轉角.關於時間的導數就是剛體繞軸旋轉的角速度. 我們還可以定義角速度關於時間的導數(即關