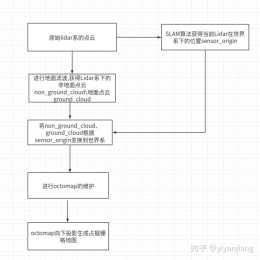
但對於室外執行的機器人,使用多線鐳射雷達,其SLAM構建的是點雲地圖,然後點雲地圖這個東西是沒辦法直接用於路徑規劃的,需要繞個彎,這也是使用多線鐳射雷達進行路徑規劃的核心:Lidar點雲生成佔據柵格地圖流程圖在構建了佔據柵格(nav_msg
我剛開始建圖的時候,我同學錄制的 TF 樹中並沒有「world -> rslidar」的變換,只有「world -> base_link」,所以為了能夠測試增量式建圖,因為我的點雲幀的 frame_id 是 rslidar,因此