
首先我們需要dem的資料(可以下載),接下來需要到的工具有[轉為整型]、[柵格轉面]、[拉伸],接下來開始進行實驗操作:實驗步驟第一步:柵格轉整型在ArcToolbox中,開啟[Spatial Analyst工具],[數學]→[轉為整型]對

這樣背光面產生的陰影就不會因為有向光面而被殘忍覆蓋了,陰影就可以直接覆蓋到建築物的底層,疊加上建築物就可以很容易判斷其是否滿足日照標準啦,如下圖所示:7.判斷陰影和建築物的覆蓋關係此時我們需要將陰影柵格轉換成向量格式,在“Shade12”

步驟3: 藉助選擇工具選擇要柵格化的物件

水文建模流程圖現在就以手中的這個DEM為例來依次使用工具集中的工具,來學習這部分功能:高程資料02流向(Flow Direction)流向工具的輸出是值範圍介於 1 到 255 之間的整型柵格
具體操作如下1將CAD匯入GIS2檢查資料,編輯刪除多餘資料3生成TIN4個性化顯示高程/坡度/坡向等所需分析結果個性化顯示調整連結(自定義樣式)如果需要柵格計算結果(好處是可以進行定量計算),看下面步驟123步驟同上4TIN轉柵格高程DE
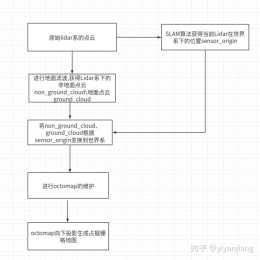
但對於室外執行的機器人,使用多線鐳射雷達,其SLAM構建的是點雲地圖,然後點雲地圖這個東西是沒辦法直接用於路徑規劃的,需要繞個彎,這也是使用多線鐳射雷達進行路徑規劃的核心:Lidar點雲生成佔據柵格地圖流程圖在構建了佔據柵格(nav_msg

處理步驟1、command+M 調出曲線工具,把這條曲線調成S形,如下圖所示:上方的控制點是讓亮處更亮(去色斑),下方的控制點是讓暗處更暗(保留陰影細節),調節時隨時觀察下邊的圖片,以保留細節為底限,不需要一步調到位

但在一些情況下,在我們匯入柵格影象後的鑲嵌資料集中,像元的數值範圍會變得很大,如下圖所示

為此,來自倫敦大學學院和Adobe Research的研究人員提出了一個新方法——Im2Vec,只需利用柵格訓練影象進行間接監督,就可以生成複雜的向量圖形
首先,要有坡度,那麼先利用ArcGIS空間分析工具集裡面的坡度分析,來把地形進行坡度分級,坡度的演算法原理非常簡單,直接透過中學的一個三角函式就能直接算出來:工具的位置如下:空間分析工具集——表面分析——坡度工具非常簡單,幾乎沒有任何需要設

迭代器插入後,將迭代器生成的要素類連線至裁剪工具,做了這一步後還沒完,關鍵在這裡,雙擊裁剪工具,設定輸出檔案命名為“%名稱%”,這裡的名稱指的是迭代器所生成的名稱,然後設定好其他的引數,如使用輸入要素裁剪幾何、環境設定等

一種傢俱代表著一種生活方式,今天就跟小編一起來五款最受歡迎的新中式沙發吧
應用與智慧物件圖層連結或未連結的圖層蒙版無法對智慧物件圖層直接執行會改變畫素資料的操作(如繪畫、減淡、加深或仿製),除非先將該圖層轉換成常規圖層(將進行柵格化)

二、水文分析開啟ArcMAp載入研究區DEM資料1.填窪操作:開啟ArcToolbox—SpatialAnalyst—水文分析—填窪,輸入研究區域DEM資料,選擇輸出表面柵格位置選擇Z限制(預設不選擇),點選確定

琢磨了個粗暴的辦法

])(2)Slope>15,提取Slope大於15的格子,賦值為1,其餘為0(3)Con(“Slope”>5,“Slope”),提取Slope大於5的格子,值不變(4)工具箱中Math下面的greater工具,結果為1和07、將

固定網格固定柵格示意如果開發那邊寫了一個固定柵格,當你從桌面縮小到平板電腦,就像是在900px的瀏覽器寬度時,你不會看到任何變化,設計就像是被剪掉了一樣
5的orthomapping,透過構建鑲嵌資料集匯入無人機資料,之後構建相機模型並生成點雲,具體流程請參見:Ortho mapping with mosaic datasets—Help | ArcGIS Desktophttp://des
如上圖操作,先按預設的方位角315、高度角45、Z因子1進行山體陰影圖的製作,然後再分別進如下幾組的對照(這裡使用批次處理)

(二)柵格資料的向量化方法1 首先在柵格資料中搜索多邊形邊界弧段相交處的節點位置2 接著從搜尋出的節點裡任選一個作為起始跟蹤節點,順著柵格單元屬性值不同的兩個柵格單元之間進行多邊形邊界弧段的跟蹤,記錄每一步跟蹤的座標,直到另一個節點為止