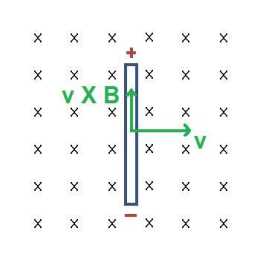
‘x’號陣列表示垂直螢幕向裡的磁場,‘v’運動方向,‘v x B’作為一個物理量,即電動勢,指向高電勢的一端
既然沒有磁單極子,那麼標有S的磁鐵的另外一邊必然是N,也就是會有與進入S一邊相同通量的磁感線從N的一邊穿出來,這是前提

(1)E=n*ΔΦ/Δt(普適公式){法拉第電磁感應定律,E:感應電動勢(V),n:感應線圈匝數,ΔΦ,Δt磁通量的變化率}(2)E=BLVsinA(切割磁感線運動) E=BLV中的v和L不可以和磁感線平行,但可以不和磁感線垂直,其中sin

第二步:基於感應電動勢正方向,使用右手定則,確定磁場正方向(右手四指指向電動勢正方向,大拇指指向為磁場正方向,如圖,此時實際磁場為正)第三步,基於公式分析電動勢實際方向由於磁棒靠近線圈,導致線圈磁場增大,即為正,所以為負,因此實際電動勢方向
但是迴路總電動勢為零並不代表區域性沒有電動勢,就像這樣:如果認為圓盤的磁通量不變,那麼說明選擇的迴路是隨著圓盤旋轉的,比如這樣的扇形:若在AB之間接入導線,則沒有電流

圖2相反電動勢與線反電動勢以及過零點單純檢測反電動勢的過零點得到6個換向時刻並不能滿足向量控制細分角度的要求,因此需要更加先進的控制演算法實現無感向量控制
一個簡單的方法,利用基爾霍夫第二定律的廣義應用翻譯成人話就是Uab等於a點到b點的路徑上的元件的電壓之和,但是元件的電壓的參考方向必須是從a指向b,要是有從b指向a的,那就取負理想電壓源電動勢E與電壓U大小相等方向相反,圖中最左邊那個電壓源

短距:(同一元件的上下元件邊相差3個槽位)左行:(左行,表示從某一換向片出發,接線一週後,回到與出發換向片左側相鄰的換向片上)單波繞組左行的連線方式同樣地,首先畫出各元件在磁場中的位置以及感應電動勢的方向:磁場中元件展開圖同樣地畫出各元件電
實際上相同材料和結構的二極體之間開啟電壓的差異可以忽略

因此,在熱電偶測溫時,可接入測量儀表,測得熱電動勢後,即可知道被測介質的溫度
短距:左行:(左行,表示從某一換向片出發,接線一週後,回到與出發換向片左側相鄰的換向片上)單波繞組左行的連線方式同樣地,首先畫出各元件在磁場中的位置以及感應電動勢的方向:磁場中元件展開圖同樣地畫出各元件電動勢的分佈圖:各元件電勢分佈單波繞組

與靜電場不同之處,一方面在於這種渦旋電場不是由電荷激發,而是由變化的磁場所激發

為了比較不同跨距下電動勢與磁動勢的正弦性,依舊引入電動勢諧波畸變率與磁動勢諧波畸變率,僅考慮基波和5、7次諧波時,兩者的畸變率,如圖1和圖2所示圖1 磁動勢畸變率與跨距關係圖2 電動勢畸變率與跨距關係在實際生產中,基波繞組係數的高低直接影響

上面“兩個截距”的“無誤差性”在文章“袁野:電源電動勢和內阻測定實驗誤差分析(1):伏安法的相對內接和相對外接對比分析”中已經採用模擬實驗的方法詳細說明了,特別是圖乙(相對電源內接法)測得的電動勢為準確值這件事情是很好理解的

關於載流導體所受的安培力,左手定則內容如下:將左手掌攤平,四指併攏,並與拇指成90°角,掌心面正對N極(或者說讓磁力線垂直穿過掌心),四指方向表示電流方向(或正電荷運動方向),拇指的指向即為電磁力方向,如圖1-1所示

切割磁感線產生的感應電動勢的三種情況分別是在勻強磁場中導體棒平動

見圖4:圖4:電池的外電路與電動勢的關係我們來看下圖:圖5:一個簡單電路和它的伏安特性曲線圖5中的E是電池電動勢,r是電池內阻,R是外電路可調電阻,K是外電路開關,U是路端電壓,其實就是電阻R兩端的電壓,I當然就是電路中的電流了
所以我們總是先用著,等出了問題再去修正理論,歷史上也是這樣,本來牛頓定律用著挺順溜的,後來發現水星軌跡不對頭之類的問題,所以最終愛因斯坦弄出了相對論來完善它,不是說牛頓定律錯了,只是說相對論更接近於客觀世界的真實狀況——畢竟物理就是用理論去
定子鐵心的內圓周表面衝有槽,用以放置三相電樞繞組
因此線圈參考系中觀察到的磁場 為:代入麥克斯韋-法拉第方程(3)、伽利略變換式(1)和(2),並根據複合函式求導鏈式法則(就是高中數學課本里的那個鏈式法則(`・ω・´)):(4)根據伽利略變換式(1)和(2)有:帶入(4)得到:(5)以及矢