論文推土機:對特斯拉決策規劃技術的理解(ddp optimization)因為這個表示式是二次泰勒,所以求導為0即是最優點:得到最優解為:現在這裡還有一步和標準iLQR(DDP)不太一樣的,就是上面的Q的各種求導表示式中有V,而我們要拿Q去

背景綜述先前寫有一篇王霄:強化學習(1),在這篇基礎之上,復現Spinningup Algorithms - Spinning Up documentation 後兩個影片遊戲demo(如下圖)後, 這次主要介紹分別為On Policy與O
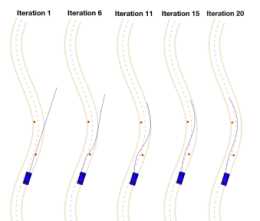
First in the path planning step, we generate candidate curves which are the paths a vehicle could travel

巡航狀態下的縱向軌跡束首先不考慮障礙物資訊,只考慮車輛的目標車速,以此進行速度規劃:末點的取樣→根據起點和末點計算四次多項式係數voidTrajectory1dGenerator::GenerateSpeedProfilesForCruis