工業機械臂(機器人)視覺定位引導系統
隨著工業的發展,在生產中對自動化的要求越來越高,視覺技術已被廣泛引入工業(工業機械臂)機器人行業,具備視覺的工業(工業機械臂)機器人能更快、更準、更靈活地完成定位抓取、對位組裝等。基於影象分析的視覺技術在(工業機械臂)機器人引導相關應用中的主要作用是精確獲取物件物(待抓取物體)和目標物(待組裝物體)的座標位置和角度,並將影象座標轉換為(工業機械臂)機器人能識別的(工業機械臂)機器人座標,指導(工業機械臂)機器人進行糾偏和組裝。因此,手眼標定和定位引導是機器視覺在(工業機械臂)機器人引導中應用的的核心。
手眼標定原理
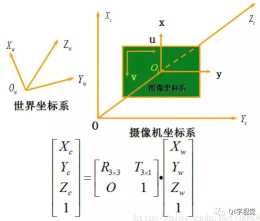
原理:所謂手眼標定,即將手(機械手)和眼(攝像機)的座標系統一起來,解決相機與機械手之間的座標轉換關係,讓機械手能精確抓取到攝像機定位的目標。

從一個座標系XOY到另一個座標系X’O’Y’,可以看做是XOY經過平移、旋轉、縮放等效到另一個座標系X’O’Y’。

上述矩陣準確描述了兩個座標系之間的關係,其中fx, fy分別是X方向和Y方向的縮放尺度,a, b分別是X方向和Y方向的平移量, θ是座標系的旋轉角度。
手眼標定流程
求解標定的轉換公式只需要三組以上兩個座標系的對應點,所以在視覺應用中一般採用N點標定演算法來實現手眼標定。
VM演算法平臺標定流程
盈泰德科技VM演算法平臺中具備豐富的定位工具和包含N點標定在內多種標定工具,可以便捷地實現手眼標定。
接收到(工業機械臂)機器人的定位觸發訊號後


手眼標定流程圖
#FormatImgID_5#
標定過程
盈泰德科技VM演算法平臺會將標定路徑以及標定精度顯示在介面端,便於使用者排查除錯流程,實現標定過程視覺化。
定位引導
在機器視覺與(工業機械臂)機器人相結合的應用中,(工業機械臂)機器人引導定位最為普遍。此類場景下,大致可分為單相機抓取定位引導、單相機糾偏引導、上下相機貼合定位引導。
1單相機抓取定位引導

上圖即為單相機定位引導的場景,相機即可安裝於(工業機械臂)機器人上,也可固定於機臺上。透過相機拍攝傳送的來料,對其進行定位以便(工業機械臂)機器人根據定位資訊抓取來料,如此可降低對工位間傳送機構的準確性要求,確保抓取位置的一致性。
基於VM演算法平臺實現單相機抓取定位引導流程如下圖所示,
接收到(工業機械臂)機器人的定位觸發訊號後
基於VM演算法平臺實現單相機糾偏引導流程如下所示,

接收到(工業機械臂)機器人的定位觸發訊號後
#FormatImgID_8#
2單相機糾偏定位引導
#FormatImgID_9#
基於VM演算法平臺實現單相機糾偏引導流程如下所示,

注:流程中各工具的使用介紹同上。
而此處用【單點對位】而非【變數計算】是因為該模組考慮了(工業機械臂)機器人末端有延展軸,使得操縱點不是法蘭中心導致的不共軸。
3上下相機對位引導
#FormatImgID_11#
應用場景:該系統可廣泛應用於3C產品螢幕及電路板的生產組裝等相關場景,如將膜與玻璃對齊貼合或將玻璃和偏光片對齊貼合等。
基於VM演算法平臺的上下相機對位引導方案如下所示,

全域性流程

上相機流程

下相機流程
注:流程中各工具的使用介紹同上。
盈泰德科技VM演算法平臺與(工業機械臂)機器人定位引導
盈泰德科技VM演算法平臺除了整合80餘種視覺工具,可實現高精度視覺定位、一鍵式手眼標定以及多種對位方式外,還具備豐富的通訊協議,已在眾多實際應用中實現了與ABB、EPSON、FANUC、UR、華數(工業機械臂)機器人、眾為興(工業機械臂)機器人等工業(工業機械臂)機器人的成功對接。

盈泰德科技機器視覺在(工業機械臂)機器人定位引導中的應用


盈泰德科技VM演算法平臺將持續豐富和最佳化視覺工具,讓視覺應用更輕鬆!
如果你的工業生產線中需要用到類似的視覺定位引導技術,那麼不妨和我們盈泰德科技聊聊,我們會先根據你的需求分析,免費從一個專業的角度來給你一個合適的方案,再聽取你的意見,即使沒達成合作,我們也希望能多認識個朋友。