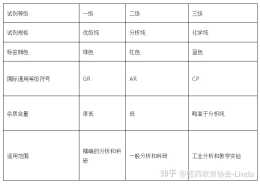
⑤擬捨棄的數字,若為兩位以上數字時不得連續進行多次修約,應根據所擬捨棄的數字中左邊第一位數字的大小,按上述規則一次修約出結果:例,18
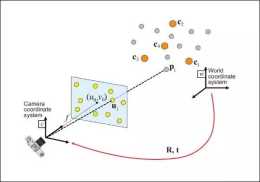
最基礎想法根據小孔成像原理,當然需要知道相機焦距(單位mm)和拍攝距離,以及畫素與毫米之間的對應關係,對應關係可以從CCD獲得
:void outputCameraParam(void){FileStorage fs(“intrinsics

在對AOI檢測裝置完成系統引數設定後,接下來工程師需要對AOI自動光學檢測裝置進行相機清晰度調整、攝像頭標定和光源亮度調整,具體的內容我們透過以下的篇幅來說明
5 擬捨棄的數字,若為兩位以上數字時不得連續進行多次修約,應根據所擬捨棄的數字中左邊第一位數字的大小,按上述規則一次修約出結果:例,18
河北萬鑫緊韌體製造有限公司,主要生產的產品有:U型螺栓、鋼結構螺栓、地腳螺栓、法蘭盤、雙頭螺栓、高速公路、鐵路、地鐵配套緊韌體、各種預埋件、高強度螺栓、高強度內六角、腳手架、通絲止水螺桿、高強度螺母、穿牆絲鋼筋馬鐙、、步步緊、頂託、丁字絲、

三、由政府統一實施的拆遷安置房轉讓應補交的土地出讓金標準:被拆遷戶原土地使用權為1990年5月19日以前取得的,按申辦轉讓手續之日的標定地價的30%收取
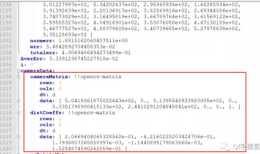
j < (int)m_vcImagePointsSeq[i]

⑤擬捨棄的數字,若為兩位以上數字時不得連續進行多次修約,應根據所擬捨棄的數字中左邊第一位數字的大小,按上述規則一次修約出結果:例,18
1.1 眼在手外涉及到四個座標系:{B}:機器人基座標系【固定不變】{E}:機器人末端連桿(與標定板固連的連桿)座標系{K}:標定板座標系,(字母 B 和 C 都被佔用了,所以隨便選個 K){C}:相機座標系【固定不變】主要就是求解D它們之
距離毫米波雷達a距離處設定雷達反射板,並在反射板上貼上精確尺寸A的攝像頭標定圖案
所以,題主意思是不是用汞燈波長來標定分光計
盈泰德科技VM演算法平臺與(工業機械臂)機器人定位引導盈泰德科技VM演算法平臺除了整合80餘種視覺工具,可實現高精度視覺定位、一鍵式手眼標定以及多種對位方式外,還具備豐富的通訊協議,已在眾多實際應用中實現了與ABB、EPSON、FANUC、

)張氏標定,簡單來說就是個透過單應矩陣的約束求解相機內參的過程
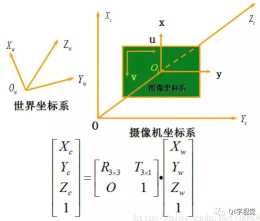
3、張正友標定介紹(張正友標定只考慮了徑向畸變,沒有考慮切向畸變)由上面的座標轉換可得:我們把世界座標系放置在標定板平面上,令Z=0,這時有:H為3X3矩陣,並且有一個元素作為齊次座標,則有8個未知元素,一組座標對應兩個方程,則至少需要四組
駕駛性還可以,車身跟隨性都不錯,算是正兒八經標定過作業系統和懸掛系統
在ESP中,內部有邏輯可以計算出當前車輛所處路面的附著能力,進而呼叫不同的factor或者邏輯進行制動系統以及動力系統的控制
個人認為基於以下幾種原因第一:手機做標定沒有什麼意義,手機拍照的更多的關注點是美不美清晰不清晰,而不是幾何精度
那麼現在問題的關鍵是如何求解M矩陣,求解過程可以分為兩步:1、按照運動鏈把末端偏差分解到每個座標系中2、建立位姿旋轉矩陣與DH偏差之間的關係用鐳射測距儀(其他的測距方法也ok,只要儀器的精度滿足你的要求)測出機器人末端相對於基座的真實位姿旋
智慧化轉型,離不開對智慧裝置的應用,以貴公司舉例,汽車配件加工通常需要用到大量電動、氣動、脈衝工具,這些工具在使用一定週期後,機率會出現示值和實際值會因產生不同程度誤差的問題,影響加工的精準度,雖然可以透過標定儀器重新校準,但大批次不同產品