可以看到這是一個後向偏導差分拉普拉斯運算元差分反映了離散函式的值的變化,導數和微分反應的是連續函式的值的變化
對於任何一個數學三的考生都知道數學三的差分方程做法是很容易遺忘的,因為平時沒做過(科班除外)這是那道題1:符號問題:其實這個題的難度在於符號,因為我的pad筆記裡面摘錄過關於差分方程的介紹考前複習了一遍差分,考試的時候有關於這個三角號的印象
其實你中學時學的數列,數列的遞推關係就是一種簡單的常差分方程我覺得常見的應用問題中,和差分方程關係最密切的應該是組合數學的問題,有相當多的有名的差分方程(遞推數列)都有很明顯的組合背景,舉幾個例子:先說常差分方程1、斐波那契數列所謂斐波那契
假設隨機變數之間存線上性關係,雙重差分的基本模型一般設定為:近年來我國雙重差分研究的運用進人快速增長期”,但是在方法運用中存在不少問題,根本原因在於忽視了“自然實驗”才是雙重差分方法的基本前提條件,將一些不合格的政策衝擊視為自然實驗,導致政
現在也有很多不用電臺,用手機卡的資料鏈,就是cors賬號GNSS主機板和各資料鏈模組之間的通訊介面用得最多的是串列埠,網路模式也有用USB

當資料鏈模式為“手簿差分”時,APN 設定的是手簿系統APN 引數
items():dfoutput[‘Critical Value (%s)’%key]=valueprint(dfoutput)test_stationarity(df

通常情況下,企業要對資料進行大量修改時,應該先做一次全部備份
因此顯式尤拉法又稱為前向尤拉(Forward Euler)再從另一個角度看,我們把上面的公式做一下變形可得f(tn,yn)=yn+1−ynh
截尾就是自相關圖,偏自相關突然衰減,拖尾波動不大2階以下排列組合一個一個試吧,係數不顯著的模型剔除,留下的看aic最小的
單點定位和差分定位是兩種不同的衛星定位方式,差分定位有位置固定、不能移動的基準站,基準站透過無線鏈路傳輸差分改正訊號給移動站,移動站結合差分改正資訊糾正定位偏差,實現釐米級精度
有這樣的機制就安全多了他們家那個AEB自動緊急制動系統也太靠譜了,能實現避讓剎車、控制車輛剎停(超聲波感測器)等功能,也能透過一些演算法控制剎車比例,能很大程度上保障學員的安全

3.3差分微帶線阻抗孔孔徑及反焊盤尺寸變化對損耗的影響目前,在PCB圖形設計中,佈線密度在不斷增大,通常由於孔與線間距的限制,實際生產中會對孔徑及反焊盤大小做一定更改,從而滿足實際生產的能力,這樣的更改會引起訊號完整性的變化,為滿足實際生產
******大訊號分析和小訊號分析結果是一樣的**********大訊號分析: 直流訊號(共模訊號、大訊號)和交流訊號(小訊號)加在一起分析小訊號分析: 僅分析交流訊號差分對的大訊號分析圖1RD1=RD2=RDΔV
從機器學習的核心最佳化方法開始,我們將看到NeurIPS 2020 Workshop中關於資料和機率的探討,也將瞭解到可差分方法和協作式AI的最新進展,還將目睹強化學習與動態決策過程的飛速發展
2、高斯機制有兩個主要缺點,它需要使用寬鬆的#FormatImgID_156#差分隱私定義,並且它不如拉普拉斯機制準確
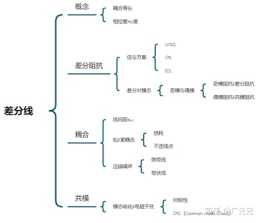
針對差分阻抗的特性,搭建相關鏈路:Vdiff= V1–V2Vdiff表示差分線號Vcomm=(V1+V2) Vcomm表示共模訊號V1表示線1相對於其返回路徑的訊號電壓V2表示線2相對於其返回路徑的訊號電壓相同電平的幅值,差分線的峰峰值是
但是,要記住一件事,差分探頭中訊號連線之間的有效接地要比單端探頭中大部分的接地層更為理想
正常來說usb的是對差分線等長的,根據平時layout的經驗有一條短1mm也沒啥影響,就是不符合設計規範,畢竟沒有長度差到離譜,而且usb2
為了增進各位對接下來matlab課程的理解,我們需要了解到差分,微分以及導數的概念和區別