直角座標系轉換公式
作者:由 宮城浪人 發表于 書法時間:2020-11-10
其實網上這種公式很多,推導也不難;但其中不少內容有含義不明,甚至是錯誤的情況。所以這裡簡要列舉一下,主要是起一個備忘錄的作用。

設有兩個直角座標系XOY和X‘O’Y‘,它們之間的夾角為θ(逆時針為正),點P與原點之間的向量記為r。設P在兩個座標系中的座標分別為(x, y)和(x’, y‘),那麼有:


即:



再加上平移,假設O’在XOY座標系中的位置為(x0, y0),那麼座標轉換公式為:


同樣的,從XOY座標系轉到X‘O’Y‘座標系的公式為:


回到X’O‘Y’轉化成XOY的公式,我們把座標寫成齊次的形式。設點P的座標為
![X=[x,y,1]^T](https://img.heatask.com/upload/website_attach/sSrUqtsERUvVll6NDuI01_mFI-OWzw3el3bUo+uUnAadDPt6BYbgtr1iofrJox2zQ1i2mZIYNbJ+3gNzK.jpeg)
和

,那麼轉化公式可簡化為旋轉矩陣:
![X={ \left[ \begin{array}{ccc} cos\theta & -sin\theta & x_0\\ sin\theta & cos\theta & y_0\\ 0 & 0 & 1 \end{array} \right ]}X](https://img.heatask.com/upload/website_attach/EqmUDwRg-pKnxqQGAJAa_n4asVQc+KjyBS+U=vjbqWPMk0K-ONtHwPB7Op1kAKimDeMc62BRy0QmSKyeliLm2oy9DgN8UEgo0t1kM-KGlphnO58ODp7m2zok=U5xjEGmUOsiRsKjF9h6NqEf=_P=x=4q69bX_55moiSc62RRAV2qYOy4FKAmR7JQN0CVWKs8AE1wMWM_DsPtZtCE7D0qgl6f62Se5B6cUtacSMvRU6HM6AhJTCHm2zofl-Me5IY=AeNqFH0Y06HbYOy4EJ2Y_nHQN05+VFxHtt1n63bft.jpeg)
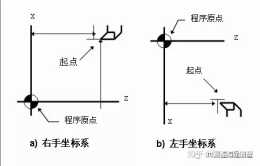
同樣的,在三維情況下也有類似的公式。假設座標分別圍繞X,Y,Z軸旋轉

的角度(右手座標系),那麼旋轉矩陣為:
![{ \left[ \begin{array}{c} x \\ y \\ z \end{array} \right ]}={ \left[ \begin{array}{ccc} 1 & 0 & 0\\ 0 & cos\alpha & -sin\alpha\\ 0 & sin\alpha & cos\alpha \end{array} \right ]}{ \left[ \begin{array}{ccc} cos\beta & 0 & sin\beta\\ 0 & 1 & 0\\ -sin\beta & 0 & cos\beta \end{array} \right ]}{ \left[ \begin{array}{ccc} cos\gamma & -sin\gamma & 0\\ sin\gamma & cos\gamma & 0\\ 0 & 0 & 1 \end{array} \right ]}{ \left[ \begin{array}{c} x](https://img.heatask.com/upload/website_attach/n7N6xn2L6h5FTsS9J7w072YmTF2DGlYgq_36Uj0AluYz-C6Hzp82Lwc3w=d0+_koYEmmtzhw-Zp1RSOq-7hTo0yMZb7B7Y+56tzoPuAEahcDF_Oo-lOAMhYrOUZ4TSDYmtmmtzhPw0Xz45kD+c9wqUY9PRBL7YY0pK0YUnw1Zw+hkkT1nyQgLw6saUZ4TlWH7aCmtzo1Zw+g_2gaeQFyR3qAx0rjIXkqZ5zoO6hkThcFAz9golbTRQAiaUZhywlzMO_GZPbyai_3kkxporQCohYrOFzlfvjDmtzvtFFNx5zCkkg0cQdc71P2td4FyaHes5mm7Be1x5zCkkg0cQdc71PIZbq5nlyLptz7OqPCx1xxV_Oo-rfB6PY9OtzhfuC8MOwHa=FPtkR-QbTbIvNyRkx2tDkFyt6eMO_Gw7bukPcDFS9HzgQx6Z6fwVZuTuCtpK3qZPKzZwpQ_v4AnyogM5iGxUZ4Tl7Hq62cZPolai_3kkxpo8Q0nQYrOFrF+vBHSyKmtz217POz+-_e0PNyvSfI7RZ4TSkoYtmc6QhHwQcDFvkHIng2Lwp8awgL7Y6pmpv8x=X=O5LzT3Henyfz6ZDjZb7Pb+7t6jimtow1ahcDFskcdrw=MhYrPRZu-_kqYEmmtzhC-Z6lkkg5olblX5q2-FOt7Y+56jXvTQaPt3Xz45kAcruyR3xITF2i7YY07p3LwjO1Zw9EV_7=eQFyRkidTJtDbXlHsARc7uX=OhcDF_L=eQFyRkidTJtDbXlHsARcTq0TZw+gjv0mfQg2Lwp8awgFyaHHSyKc7uFP7SK3+z9H0CJ2vUA2td_FeuTHSnX=xbpUVUcFAz9enyfzo0NdUlkL7YY1MOwHZPK_ahcDFvyHdcWyRkpIZbdAbuYan_8mtopUxqLx-xOqUvbEX032tDkLI_ktStmmtz2Ptkv3-xOtzlNyRk32td4LIwktStmcZPby-ZBfkkT5cR9TKab2tDkLnSkoYqXa-qStahcDAzOqUvb-YCx2tDqL7YY0o6_IkuX=OQOz4W4EdQo0nQY9OtzhfuC8MOwHZPK_ThcFAzLrny8EMhYrOUZ4TSD8MOWoa=X=OhcDF_LYny8EMhA2td_FeuTHSnX=xbpUVUcFAz9enyfzo0NdUlkL7YY1MOwHR.jpeg)
即為尤拉角公式,注意尤拉角是有旋轉順序的,因為矩陣乘法不滿足交換律!!!
同樣三維的也可以寫成齊次的形式:
![{ \left[ \begin{array}{c} x \\ y \\ z \\1 \end{array} \right ]}={ \left[ \begin{array}{cccc} & & &x_0\\ & T & &y_0\\ & & &z_0\\0&0&0&1\end{array} \right ]}{ \left[ \begin{array}{c} x](https://img.heatask.com/upload/website_attach/ApgbVYrikBkLzGVGOYP+VM_1RmnvrYFvNRsbxEpdLG53gv83qbdJdQSv-8TLao=X1B2nlsFGBUy+PP_L1Y=EX9v0X_Xlf3zoEDjezr5b_Bt85B_81G5meN_MCBjHi86hhDjcyMRY3CoJj_S4FA1QdQWDRwcOVlEIqqzxcMRY3G_+NmCrhGR8hF_GNDjP_o=Z1B2nlsFfBUCrj_SthGR8gHbuSm54f3zoEScGUF-J8L43LLbOEdFOdQWsYB2t8HCShDjGl04Ti_i9gt6_gsU4dQSvYBjOAm65hDjGl04JVzCmBCs3q=r3ESo7YBjOAmKSgzbdcMR98I-XXD_81GR8gOsuKzw-f3_YxsjGl2tJ8Q93Pry3qbeBXKbOxij1_oKSgzToVWvjC94Jj_S5gsZ5dQWDYBjHiYDIFdznlsdTi_E4CrSeAA03EmbOUIczb2=Z2sjeyWrJ8L4JgD_EqG43ESouvQppb2=8qD2nlsrJ8QWJgP_EqG43ESouvQpU+8=X18TIwrRa3rpEyrvmgsZ5eN1uvQDOX=zjNs2nlshJ8L42A.jpeg)